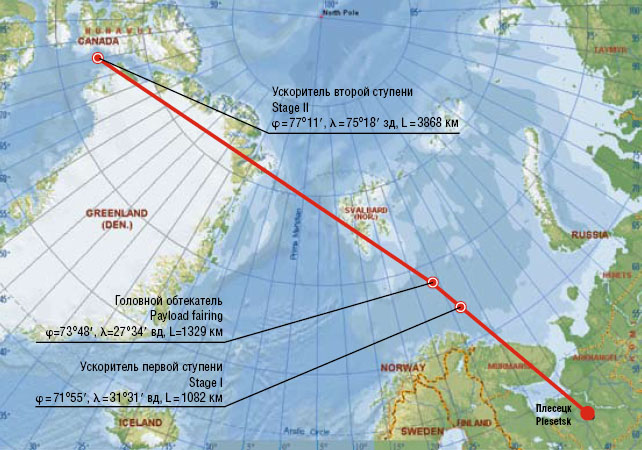
Launch site:
Plesetsk
Launch date:
November 2, 2009
The launch time is:
4 : 50 : 51 Moscow 02.11.2009
1 : 50 : 51 UTC November 2, 2009
8 : 50 : 51 p.m. EST November 1, 2009
Payload:
SMOS, PROBA-2
Spacecraft 1:
SMOS, Soil Moisture and Ocean Salinity mission
SMOS is next in the series of ESA’s Earth Explorer missions, which are designed to observe critical Earth system variables.
Designed and built by a European consortium of industry and science, SMOS – also known as ESA’s Water Mission – is the first satellite dedicated to providing global measurements of soil moisture and ocean salinity.
The Earth Explorer missions form the science and research element of the ESA’s Living Planet Programme and focus on the atmosphere, biosphere, hydrosphere, cryosphere and the Earth’s interior, with the overall emphasis on learning more about the interactions between these components and the impact that human activity is having on natural Earth processes.
The first of the ESA ’Earth Explorers’ – GOCE (Gravity Field and Steady-State Ocean Circulation Explorer) – was successfully launched on a Rockot launch vehicle from Plesetsk launch site in March 2009.
Mission Objectives
1. Soil moisture. Accuracy of 4% at a spatial resolution of 50 km and revisit time of 1-3 days. This is comparable to being able to detect one teaspoonful of water mixed into a handful of soil.
2. Ocean salinity. Accuracy of 0.5-1.5 practical salinity units (psu) for a single observation/0.1 psu for a 30-day average for an area 200x200 km, which is comparable to detecting 0.1 g of salt in a litre of water.
Data from SMOS will:
1. Fill the current lack of global and continuous observations of soil moisture and ocean salinity needed to improve our understanding of Earth’s water cycle. This will help understand more about how a changing climate may be affecting patterns of evaporation over the land and oceans. Data from SMOS could improve weather and climate models, and have practical applications in areas such as agriculture and water resource management.
2. Provide, for the first time, regularly-updated ocean salinity mapping from space, furthering our knowledge of ocean circulation patterns and their role in the climate system.
SMOS Spacecraft Specifications
Items|Specs
Application|Soil Moisture and Ocean Salinity Observation
Orbit Type|Low-Earth, polar, Sun-synchronous, quasi-circular, dusk-dawn, 23-day repeat cycle, 3-day sub-cycle
Orbit Inclination|98.44°
Mean Altitude|758 km
Lifetime|Three years (including a six-month commissioning phase) with a possible two-year extension
Mass|658 kg (Proteus platform: 275 kg, payload: 355 kg, fuel: 28 kg)
Configuration/Dimensions at launch|Satellite platform (approx. 1 m3) with deployable solar generator panels and interface towards the launch vehicle. The payload module (appox.1m3) is mounted on top of the platform. Overall dimensions in launch configuration fit into a cylinder 2.4 m high and 2.3 m in diameter
Payload|Microwave Imaging Radiometer using Aperture Synthesis (MIRAS) – the first spaceborne, 2D interferometric L-band radiometer operating at 1.4 GHz (21 cm wavelength), with 69 antenna receivers distributed on a Y-shaped deployable antenna array and central hub. H and V polarizations measured sequentially. MIRAS will make global observations of emitted microwave radiation through almost all atmospheric conditions, at least once every three days
Power|Maximum available for satellite: 1,065 W; Maximum consumption for MIRAS payload: 511 W; Proteus platform battery: 78 A·h Li-Ion
Propulsion|Hydrazine
Stabilization|3-axis stabilized
Satellite Attitude|32.5 degrees forward tilt in flight direction, local normal pointing and yaw steering
Control and Navigation|Star-trackers, gyros, magnetometers, GPS, Sun sensors; Reaction wheels, magnetotorquers, 4x1-N thrusters
Communication links|X-band downlink for science data to ESA’s European Space Astronomy Centre (ESAC) in Villafranca, Spain, complemented by an X-band station in Svalbard, Norway, for acquisition of near-realtime data products; S-band uplink (4 kbps) and downlink (722 kbps) to Kiruna, Sweden, for satellite telemetry and telecommand (generic Proteus ground station)
Command and Control|Platform integrated data handling, and Attitude and Orbit Control system computer that interfaces with the payload’s own control and correlator unit via a 1,533 bus and serial links
Mission control|CNES Proteus Control and Command Centre in Toulouse, France, via CNES S-band ground station network – Kiruna in Sweden, Aussaguel in France and Kourou in French Guiana Flight Operations
Data processing|Data Processing Centre at ESAC, long-term archive at Kiruna, and User Services via ESA’s Centre for Earth Observation ESRIN in Frascati, Italy
Launch Vehicle|Rockot with Breeze KM upper stage
Owner and Operator|SMOS is an ESA Earth Explorer mission with national contributions provided by the French and Spanish space agencies, CNES and CDTI. For the operations phase, ESA will be responsible for the overall coordination of the mission and the ground segment operations, whereas CNES will operate the spacecraft
Launch Services Provider|Eurockot Launch Services, Bremen, Germany
Satellite Manufacturers|The design and construction of SMOS involved more than 20 European companies and was led by EADS CASA Espacio (Spain) for the payload and Thales Alenia Space Industries (France) for the satellite (Proteus platform adapted to the needs of the SMOS mission)
Launch Vehicle Manufacturer|Khrunichev State Research and Production Space Center, Moscow, Russia
Launch Site|Plesetsk Cosmodrome, Russia
Launch|November 2, 2009
Instrument
See deployment animation at:
http://www.esa.int/SPECIALS/smos/SEM23K6CTWF_0.html
One of the biggest challenges in developing the SMOS mission was to fly and demonstrate an instrument that would measure microwave radiation emitted from Earth’s surface within the ‘L-band’, around a frequency of 1.4 GHz. This frequency provides the best sensitivity to variations of moisture in the soil and changes in the salinity of the ocean, coupled with minimal disturbance from weather, atmosphere and vegetation cover.
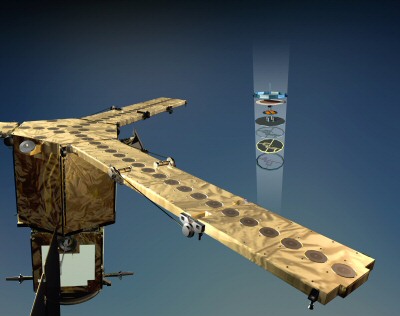
In order to achieve the spatial resolution required for observing soil moisture and ocean salinity, the laws of physics mean that to take measurements in L-band, a huge antenna would have been required – too big for a satellite to carry. To overcome this challenge, the Microwave Imaging Radiometer with Aperture Synthesis (MIRAS) instrument was developed. Here the size of the antenna needed has been simulated through 69 small antennas, distributed over the three arms and central hub of the instrument.
The three deployable arms are folded up for launch, but once SMOS is in orbit each of the arms fold out into an unusual three-pointed star shape. Hence, with a diameter of eight metres, MIRAS is often dubbed a ‘star in the sky’.
The 69 antenna elements, called LICEFs, are antenna-receiver integrated units, each measure radiation emitted from Earth’s surface at L-band. One LICEF antenna weighs 190 g, is 165 mm in diameter and 19 mm high.
MIRAS was built by a consortium of over 20 European companies led by EADS-CASA Espacio in Spain.
Spacecraft 2:
PROBA-2
Proba stands for PRoject for OnBoard Autonomy. The Proba satellites are among the smallest spacecraft ever to be flown by ESA, but they are making a big impact in the field of space technology. The Proba satellites are part of ESA’s In orbit Technology Demonstration Programme: missions dedicated to the demonstration of innovative technologies. In orbit demonstration is the final step on the technology development ladder. In orbit demonstration is achieved through experiments on carriers of opportunity, e.g. the International Space Station, or through dedicated small satellites such as the Proba series, which were created to increase the availability of flight-testing opportunities. Proba-2 is the second of the series, building on nearly eight years of successful Proba-1 experience.
Altogether, 17 new technological developments and four scientific experiments, focused on solar and space weather observations, are being flown on Proba-2.
The technology demonstrations are:
1. a new type of lithium-ion battery, developed by SAFT (FR);
2. an advanced data and power management system, containing many new component technologies including the LEON processor developed by Verhaert Space (BE);
3. combined carbon-fibre and aluminum structural panels, developed by Apco Technologies SA (CH);
4. new models of reaction wheels from Dynacon (CA), star trackers from DTU (DK) and GPS receivers from DLR (DE);
5. an upgraded telecommand system with a decoder largely implemented in software by STT-SystemTechnik GmbH (DE);
6. a digital Sun-sensor, developed by TNO (NL);
7. a dual-frequency GPS receiver, developed by Alcatel Espace (FR);
8. a fibre-sensor system for monitoring temperatures and pressures around the spacecraft, developed by MPB Communications Inc. (CA);
9. a new star tracker system, used in BepiColombo project (Galileo Avionica, Italy);
10. a new star-tracker development being test-flown before use on the BepiColombo mission, developed by Galileo Avionica (IT);
11. a very high precision flux-gate magnetometer, developed by DTU (DK);
12. an experimental solar panel with a solar flux concentrator, developed by CSL (BE);
13. a xenon gas propulsion system using resistojet thrusters and a solid-state nitrogen gas generator to pressurise the propellant tanks, developed by SSTL (GB) and Bradford (NL);
14. an exploration micro-camera (X-CAM), developed by Space-X (CH);
15. new GNC algorithms developed by NGC (CA);
16. three new high rate three-axis precision magnetometer(s), two analogue Hi-Rel fluxgate and one digital AMR (Anisotropic Magnetic Resistor) magnetometer developed by ZARM Technik AG (DE).
The two solar observation experiments are:
1. a Lyman-Alpha radiator (LYRA) that will monitor four bands in a very wide ultraviolet spectrum, with Centre Spatial de Liege as lead institute supported by the Royal Observatory of Belgium as scientific leader and with an international team comprising PMOD (CH), IMOMEC (BE) and BISA (BE);
2. an extreme-ultraviolet telescope (SWAP) using new pixel sensor technology (APS), that will make measurements of the solar corona in a very narrow band, with Centre Spatial de Liege as lead institute supported by the Royal Observatory of Belgium and with an industrial team comprising Alcatel Lucent (BE), AMOS SA (BE), DELTATEC (BE), Fill Factory NV (BE) and OIP NV (BE).
The two space weather experiments are:
1. Dual Segmented Langmuir Probes (DSLP), which will measure electron density and temperature in the background plasma of the Earth’s magnetosphere;
2. a thermal plasma measurement unit (TPMU), that will measure ion densities and composition.
Both were developed by a Czech consortium, led by the Institute of Atmospheric Physics, Academy of Sciences of the Czech Republic (CZ).
Proba-2 Spacecraft Specifications
Items|Specs
Application|Technology demonstration mission incorporating 17 new technological developments and four scientific experiments (focused on solar and space weather observations)
Orbit Type|Almost circular, Sun synchronous, dusk-dawn
Orbit Inclination|98.298 degrees
Orbit Altitude|between 700 and 800 km
Nominal Lifetime|2 years
Mass|Approx. 130 kg
Configuration|A 600mm x 700mm x 850mm, box-shaped structure with two deployable solar panels
Attitude control and navigation|The Proba-2 spacecraft is fully three-axis stabilized. Turning moments are supplied by four 30 mN-m Dynacon reaction wheels, which can be unloaded by means of magnetorquers. Attitude determination is performed using an autonomous high-accuracy (5 arcsec over 10 seconds) two-head star tracker, GPS sensors and a three-axis magnetometer. Sun pointing to 100 arcsec accuracy is expected to be achieved
Autonomous navigation|is enabled with GPS position determination and orbit propagation. All the required navigation and manoeuvring computations are performed on-board. A single resist jet thruster, capable of producing a thrust of 20 mN, is being used for orbit adjustment. The thruster uses xenon as the propellant gas and, as the xenon supply is depleted, the tank is re-pressurised with nitrogen from a solid-state gas generator
Power|Power is generated by triple-junction gallium-arsenide solar cells mounted on two deployable panels and one fixed panel. The solar generators provide a maximum of 110 Watts of electrical power at the end of the nominal two-year mission. A 16.5 A·h lithium-ion battery supplies power during eclipses and when specific payload experiments require a peak power greater than the solar generators can supply
The spacecraft’s power consumption varies between 53 and 110 Watts, depending on its mode of operation
Propulsion|Xenon propulsion system with resistojet thruster
Communication links|During normal operations Proba-2 communicates via an S-band link with ESA’s Redu, Belgium, control centre, which is equipped with a 2.4 metre dish antenna. The S-band channel provides a 64 Kbit/s packet telecommand uplink and 1 Mbit/s packet telemetry downlink. The Norwegian ground station on Svalbard is being used during the launch and early orbit (LEOP) phase and to provide extended science data download during the operational mission.
Mission control/ processing/archiving|A dedicated ground station at ESA Redu, in Belgium. Scientific data is distributed from Redu via a web server
Industrial Team|The Prime Contractor for the Proba-2 project is Verhaert Design and Development NV (B), a subsidiary of QinetiQ (UK), who is leading a pan-European team responsible for the development and manufacture of the satellite
Owner and Operator|European Space Agency
Launch Services Provider|Eurockot Launch Services (Bremen, Germany).
Launch Vehicle|Rockot (with Breeze KM upper stage)
Launch Vehicle Manufacture|Khrunichev State Research and Production Space Center (Moscow, Russia)
Launch Site|Plesetsk Cosmodrome, Russia
Launch|November 2009. The spacecraft will be a secondary passenger during the launch of ESA’s Soil Moisture and Ocean Salinity (SMOS) mission