I am trying to learn how to use the RMS. I have looked at a few tutorials from Shuttle Fleet and STS Payloads. The tutorials are fine and I can manipulate the arm, however, I thought the arm was controlled by using a joystick type configuration. The entering of speed, degrees, joints, seems very complex and inaccurate. I must be missing something here, how do the Shuttle crew do it?
What I am looking for is "
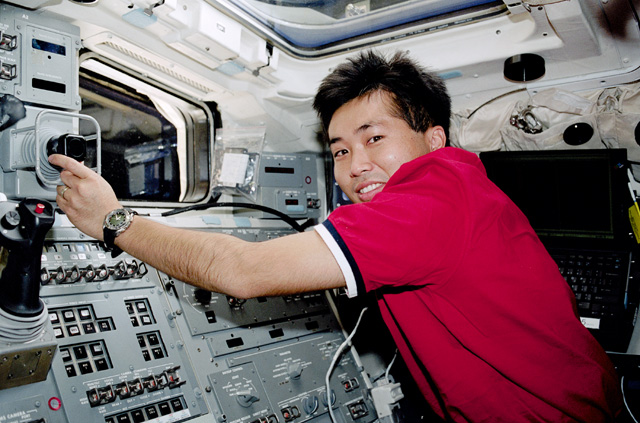
[SIZE=-1]Robot arm operation (STS-92)[/SIZE]SRMS is operated inside the Space Shuttle cabin. The operation is performed from the aft flight deck (AFD), right behind the cockpit, either through the window or by watching two TV monitors.
To control the SRMS, the operator uses the translational hand controller (THC) with his or her left hand and manipulates the rotational hand controller (RHC) with his or her right hand."
What I am looking for is "
[SIZE=-1]Robot arm operation (STS-92)[/SIZE]SRMS is operated inside the Space Shuttle cabin. The operation is performed from the aft flight deck (AFD), right behind the cockpit, either through the window or by watching two TV monitors.
To control the SRMS, the operator uses the translational hand controller (THC) with his or her left hand and manipulates the rotational hand controller (RHC) with his or her right hand."