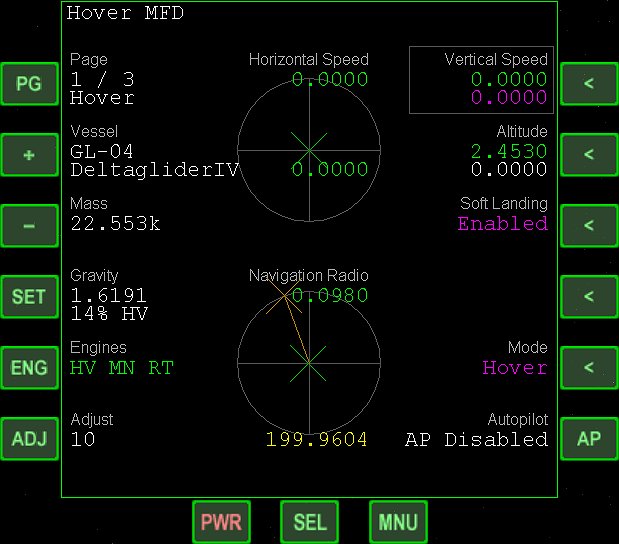
Hover MFD is an add-on for Orbiter introducing a new multifunctional display and a universal (meant for all spacecraft) autopilot for many kinds of maneuvers that use your hover engines.
The autopilot functions are inspired by autopilots built in Arrow Freighter and DGIV. I wanted these functions to be available for other spacecraft and I wanted some fine tuning to be able, like having a “Level Horizon” that doesn’t keep pitch and bank to zero, but only one of both.
With the right parameter setup the autopilot can:
- Launch in hover style (e.g. from pad)
- Landing in hover style (e.g. on pad)
- Apply desired vertical speed (up or down)
- Slow downward vertical speed automatically for soft touchdown
- Maintain specific altitude
- Keep horizon level (standard) or any other pitch and bank
- Turn to desired heading
- Turn nose into horizontal airspeed direction (or relative to)
- Turn (relative) to target (NAV signal, coordinates, named base)
- Travel to target by main- and retro-engine
- Travel to target by hover-engine with pitch/bank control
- Maintain or capture center position over target
- Taxi from pad to pad (or any other target)
- Dynamic engine assignment (pod thruster support)
- New setting “Alt Mode / Delta” on page 1 lets you switch between altitude above ground or mean radius
- Reworked “VS To Target” for surface elevation of target, changed display to current and target VS value
- Horizontal speed is now using ground speed instead of airspeed
- Workaround for Orbiter [v.160828] issue with SetAttitudeRotLevel
Here are some video samples using Hover MFD:
DG going into Tailsit mode (1.1.1)
http://youtu.be/AO-y6A9B8 Uc
Using Travel page for base approach (1.1.0)
http://youtu.be/a_L--KlDo 1g
ShuttleA pod thrusters used dynamically (1.1.0)
http://youtu.be/xcaFzxcTf wY
Launch, taxiing and landing (1.0.2)
http://youtu.be/X9zPhNLd7 qw
XR2 heli taxiing on earth (1.0.2)
http://youtu.be/wM5lHUaAX Jk
Installation or update: Unpack HoverMFD-VERSION.zip to your orbiter folder and overwrite all files.
Read the HoverMFD.pdf (unpacked in orbiter's doc folder) for more details.
DOWNLOAD
Last edited:
")
