You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Orbiter Screenshot Thread
- Thread starter Tex
- Start date
Interceptor
Well-known member
Not to be nosey,but what happened to SiameseCat?The Canadarm2 and the Dextre are good examples also.
I miss SiameseCat so much.

Not to be nosey,but what happened to SiameseCat?
It's a mystery. :shrug:
Interceptor
Well-known member
Thanks Don,I hope he is ok,he has been a stable part of this community for years.It's a mystery. :shrug:



Yuri_Gagarin
New member
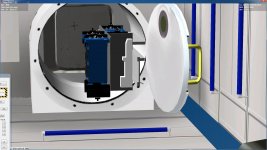
What mod is that.
What mod is that.
The IDA (International Docking Adapter) is from here:
https://www.orbiter-forum.com/showthread.php?t=35320
and the Dragon-2 is the recent mod by BrianJ on OH here: orbithangar.com/searchid.php?ID=7198 (copy and paste as for some reason any link to O-H seems to bug)
I did the scenario myself with ISS A2Z, ISS US, and many other modules for the ISS.
Last edited:


- Joined
- Oct 11, 2009
- Messages
- 3,486
- Reaction score
- 407
- Points
- 123
- Location
- Utrecht
- Website
- www.spaceflightnewsapi.net
Cool!
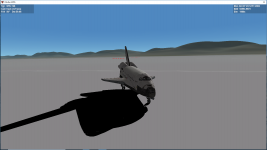
Trying to get my manual skills back after a long hiatus. And... well lets face it, the autopilots on the XRs has made me lazy. So after trying to manually land the shuttle at Edwards (and missing badly), I did manage to make it to White Sands (barely).
Attachments
MSL 2016

Trying to get my manual skills back after a long hiatus. And... well lets face it, the autopilots on the XRs has made me lazy. So after trying to manually land the shuttle at Edwards (and missing badly), I did manage to make it to White Sands (barely).
As my instructor would say:
A landing is ... ! (you know the rest)
Good job :thumbup:









Similar threads
- Replies
- 7
- Views
- 4K
- Replies
- 1
- Views
- 5K
- Replies
- 12
- Views
- 5K
- Replies
- 10
- Views
- 4K