Thanks for your efforts Indy. Here are my first impressions: the greatest issue for me is to know what to do and when to do it.
In my STS-114 attempt I pretty much followed the steps you highlighted in the STS-126 walkthrough, basically I took my STS-114 plan with the following changes: OMS-2 target PeA was changed to match the real mission one, NC-2 and NC-4 TIGs were changed in order to meet the Ti constraints, unlike your STS-126 no burns were cancelled from the original plan and last I executed the onboard targeted maneuvers directly with SSU with SPEC34.
In the end I made it to the ISS pretty much on schedule but without the suggestions in your walkthrough I doubt my mission would have ended the same way..
I wonder wether your STS-126 walkthrough can be used as general guideline for all missions or I just got lucky that it worked ok this time for my STS-114
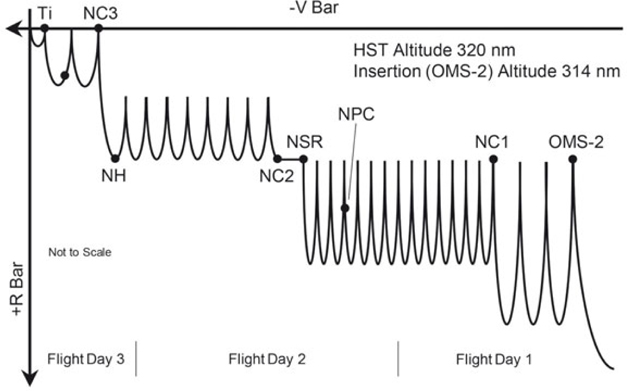
I do think that it applies to most Shuttle rendezvous, at least with the ISS. There are definitely variations, some of them mission specific, and I haven't encountered all of them or had great results yet with all of them. Some missions will have the NH type maneuver on flight day 2, with a NH maneuver on FD3 that is a 0 fps placeholder maneuver. You definitely have to check each mission individually how the rendezvous was done. But usually you will get to your target with the techniques from the STS-126 example.
What exactly does the message "too many iterations" mean? What fires it? What is the best way to clear it either temporarily in a plan, or permanently in a plan?
I know those are generic questions, so I understand if you can't answer them with a specific situation to reference.
Tim
The three types of iterators in the MFD (NC, NH and NPC maneuver) can cause that message. Why it happens needs some explanation of how the iteration works and some orbital mechanics.
In the case of the NC and NH maneuver the maneuver are always horizontally (only DVX component) and they start with an assumption of 0 fps, or if a secondary constraint of the type DV was used, it starts with that DV. Then it predicts the trajectory of the full plan until the time of the secondary constraint (e.g. coasting along from NC-1 to NC-4, which has a DR constraint of -40 NM). There it checks the actual downrange distance and saves it. On the next cycle it will do the same again, but with a DV modified by 1 fps. With that it starts the proper iteration using Newton's method, until the downrange error is below a certain threshold (currently 5 meters).
Now the orbital mechanics part. Let's look at the NH maneuver. It can only properly adjust a delta height, if it is close to 180° from the point where the secondary constraint is applied. That's why e.g. NC-4 is 0.5 orbits (M = 0.5) after the NH maneuver. That is the ideal case. If the NH maneuver is much earlier then it still should be 180° plus several full orbits from the constraint (basically M = 1.5, M = 2.5 etc.) If that isn't the case then the iteration of the NH maneuver already has some issues. Also, the maneuver works best if it happens at an apsis, so either apoapsis or periapsis, or else it doesn't just adjust height, but also rotates the line of apsides, which is bad for the iteration. It would change the shape of the orbit and while it might find the right DH you will probably get an orbit which was changed to the worse over all. And it's of course not very DV optimal, not close to a Hohmann transfer.
The NC iteration usually doesn't have much trouble converging, but if there are maneuvers in between the NC maneuver and the maneuver where the DR constraint is applied, then those have the potential of throwing the iteration off as well.
Now to the NPC maneuver. I'll just talk about the spherical gravity case; as I said above the non-spherical gravity logic for it can cause issues and will be updated in the next release. The NPC maneuver, when it is set at a Common Node (CN secondary constraint), will not have fixed TIG, but will be located somewhere after the threshold time. So if all the previous maneuvers (e.g. OMS-2, NC-1 etc.) were all located neatly on a maneuver line, at apoapsis or periapsis, then the final NPC TIG will not be on such a line. So the maneuver after the NPC maneuver will initially need some constraint, that puts it back on the line of apsides or the relative line of apsides with the target. That constraint can be APO, PER or APS. Later on the TIG of that maneuver will be fixed and it's not a problem anymore, but e.g. a simple "M = 8.0" for the maneuver after NPC is not enough.
So it does require a bit of orbital mechanics knowledge to fix some of the "too many iteration" causes and it's not really something I can improve much. I will check though if the OMP should output an evaluation table even if an error has been thrown, that might help with debugging the constraints table.
@Indy91: On thing I'm not 100% clear on. At the end when you do the MC burns post Ti, does the FDO calculate the TIG's, or do those come from the actual NASA flight plan? Is there a way to calculate them for any launch where you don't have a NASA flight plan to guide the final rendezvous?
On the day of rendezvous you should end up with a rendezvous plan that has fixed TIGs for NH, NC-4 and TI. The midcourse correction burns (and the NCC maneuver) happen at times relative to TI, so you can simply calculate the MC TIGs that way. I linked a document with that in the walkthrough, check this document:
https://www.nasa.gov/centers/johnson/pdf/567076main_RNDZ_135_F.pdf on PDF page 118 and 119. That contains the SPEC 34 targeting data and the relative timing of maneuvers for various altitudes. For the ISS they usually used the 210NM data, for Hubble use the 310NM one.




")