- Joined
- Oct 30, 2009
- Messages
- 14,020
- Reaction score
- 4
- Points
- 0
Vega's first launch, dubbed VV01, will mark the end of nine years of development by ESA and its partners, Italian space agency ASI, French space agency CNES and industry.
The vehicle will lift off from the new Vega launch site at Europe’s Spaceport in Kourou, French Guiana, carrying nine satellites into orbit: the LARES laser relativity satellite and ALMASat-1 from ASI with seven CubeSats from European Universities.
The mission will qualify the overall Vega system, including the vehicle, the ground infrastructure and operations from the launch campaign to the payload separation and disposal of the upper module.
It will demonstrate the correct behaviour of all elements and functions of the launch system in real conditions. In particular, it will demonstrate the vehicle’s performances and payload services in flight, after completion of the qualification process on ground.
 |
|
{colsp=5}
|

There is calendar event created for this launch, for which you can request a reminder.
Live coverage of the launch:
The launch coverage will be carried live on the ESA website, as well as on the ESA's Livestream channel.
Live transmission starts at 9:40 UTC, Feb. 13, 2012 - i.e.[eventtimer]2012-2-13 9:40? in | ;%c%%h% hours, %m%[/eventtimer] minutes[eventtimer]2012-2-13 9:40?.| ago.;%c%[/eventtimer]
Payloads:
Launch Vehicle:
 |
|
|
First Stage
|
Second Stage
|
Third Stage
|
Fourth Stage
Rocket stages:
Mission highlights:
Launch campaign:
Countdown & Launch timeline:
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
{colsp=4}
Links:
The vehicle will lift off from the new Vega launch site at Europe’s Spaceport in Kourou, French Guiana, carrying nine satellites into orbit: the LARES laser relativity satellite and ALMASat-1 from ASI with seven CubeSats from European Universities.
The mission will qualify the overall Vega system, including the vehicle, the ground infrastructure and operations from the launch campaign to the payload separation and disposal of the upper module.
It will demonstrate the correct behaviour of all elements and functions of the launch system in real conditions. In particular, it will demonstrate the vehicle’s performances and payload services in flight, after completion of the qualification process on ground.
Date:
|{colsp=4}
Feb. 13, 2012
Window
|
UTC
|
GFT
|
CET
|
EST
Open:
|
10:00
|
07:00
|
11:00
|
05:00
Close:
|
13:00
|
10:00
|
14:00
|
08:00
Site:
|{colsp=4}
ELA-1, Kourou, French Guiana
{colsp=5}
[highlight]L[eventtimer]2012-2-13 10:0;%c%%ddd%/%hh%:%mm%:%ss%[/eventtimer][/highlight]
There is calendar event created for this launch, for which you can request a reminder.
Live coverage of the launch:
The launch coverage will be carried live on the ESA website, as well as on the ESA's Livestream channel.
Live transmission starts at 9:40 UTC, Feb. 13, 2012 - i.e.[eventtimer]2012-2-13 9:40? in | ;%c%%h% hours, %m%[/eventtimer] minutes[eventtimer]2012-2-13 9:40?.| ago.;%c%[/eventtimer]
Payloads:
LARES:
ALMASat-1:
E-ST@R:
Goliat:
MaSat-1:
PW-Sat-1:
ROBUSTA:
UniCubeSat-GG:
Xatcobeo:
Characteristics:
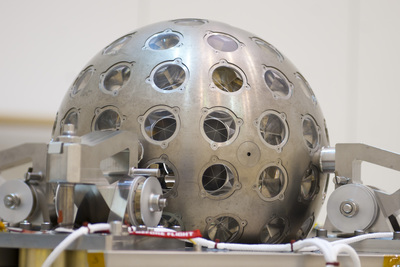
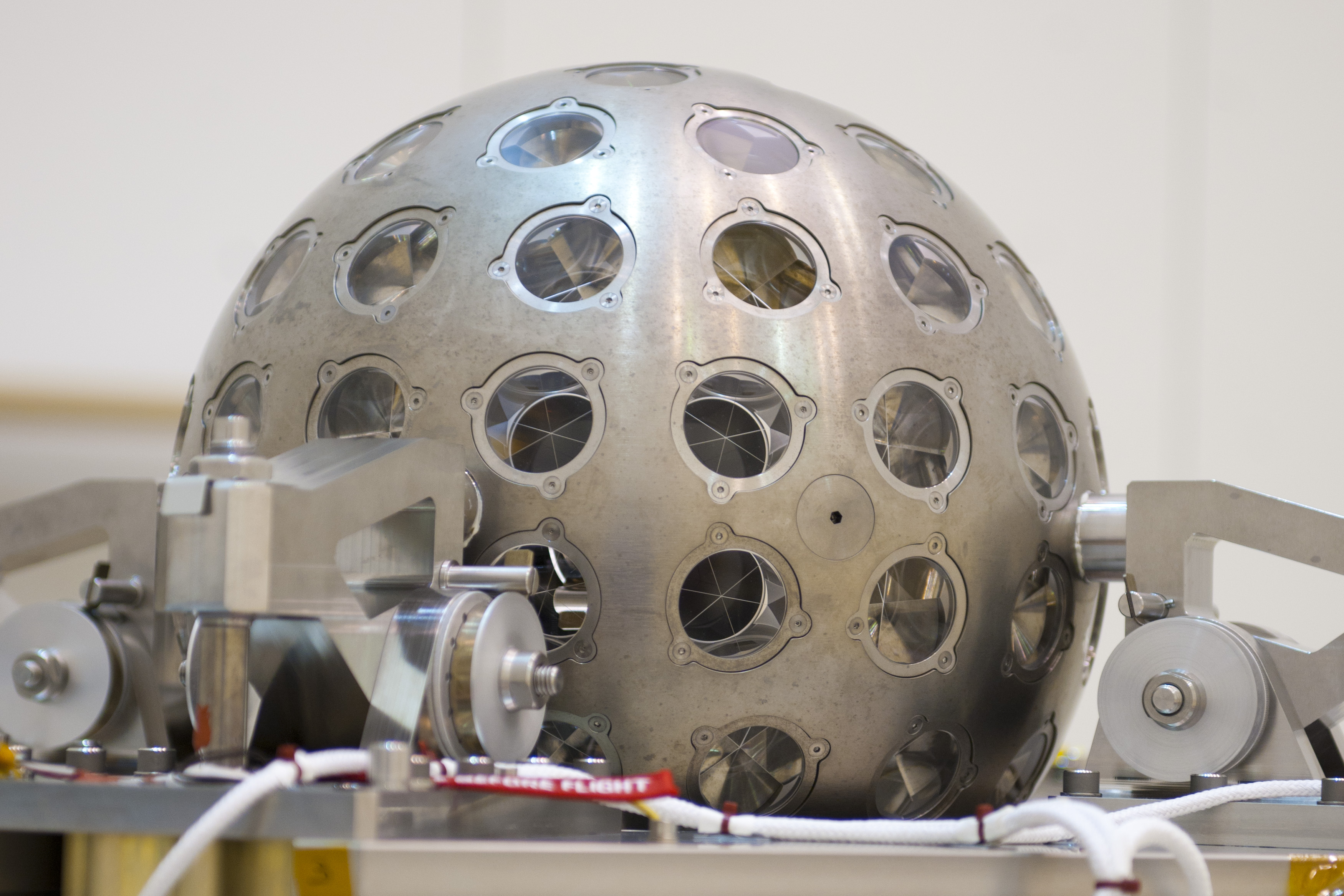
LARES (Laser Relativity Satellite) is a science satellite developed by ASI to study the ‘Lense–Thirring effect’ – a consequence of Einstein’s general relativity – explaining precession of bodies’ orbits in the vicinity of large spinning masses such as Earth.
The satellite, built by Carlo Gavazzi Space, is a passive 376 mm-diameter sphere made of tungsten alloy weighing about 400 kg. It features 92 cube corner retroreflectors for laser ranging from Earth. LARES will be released into a 1450 km-altitude circular orbit and will complement ASI’s previous Lageos-1 and Lageos-2 laser geodynamics satellites, launched in 1976 and 1992, respectively.
As LARES orbits the Earth, laser beams are emitted from a number of ground stations around the Earth, the International Laser Ranging Service, and reflected by the CCRs on LARES to the ground stations. The time delay between emission and arrival of the laser beam provides a measure of the round-trip distance to LARES, allowing a highly accurate orbit determination. Correcting for a number of effects, most importantly the deviation of the Earth gravitational field from an ideal sphere, yields the frame-dragging effect.
The avionic in the LARES support structure is also in charge of powering the separation systems for the other payloads, driven by launch vehicle commands to the LARES avionics.
The main scientific objectives of the LARES mission are:
 |
|
The satellite, built by Carlo Gavazzi Space, is a passive 376 mm-diameter sphere made of tungsten alloy weighing about 400 kg. It features 92 cube corner retroreflectors for laser ranging from Earth. LARES will be released into a 1450 km-altitude circular orbit and will complement ASI’s previous Lageos-1 and Lageos-2 laser geodynamics satellites, launched in 1976 and 1992, respectively.
As LARES orbits the Earth, laser beams are emitted from a number of ground stations around the Earth, the International Laser Ranging Service, and reflected by the CCRs on LARES to the ground stations. The time delay between emission and arrival of the laser beam provides a measure of the round-trip distance to LARES, allowing a highly accurate orbit determination. Correcting for a number of effects, most importantly the deviation of the Earth gravitational field from an ideal sphere, yields the frame-dragging effect.
The avionic in the LARES support structure is also in charge of powering the separation systems for the other payloads, driven by launch vehicle commands to the LARES avionics.
The main scientific objectives of the LARES mission are:
- High precision tests of Einstein's theory of general relativity, in particular:
- A measurement of the Lense-Thirring effect due to the Earth's angular momentum and a high precision test of the Earth's gravitomagnetic field. The Lense-Thirring effect is a tiny shift of the orbit of a test particle. Gravitomagnetic field and Lense-Thirring effect are theoretical predictions of Einstein's theory of general relativity.
- An improved, high precision, test of the inverse square law for very weak-field gravity and test of the equivalence principle.
- A measurement of the general relativistic perigee precession of LARES and a high precision measurement of the corresponding combination of the PPN (Parametrized-Post-Newtonian) parameters beta and gamma. The PPN parameters beta and gamma test Einstein's theory of gravitation versus other metric theories of gravitation.
- Other tests of general relativity and gravitation.
- Measurements and improved determinations in geodesy and geodynamics.
 |
|
ALMASat-1:
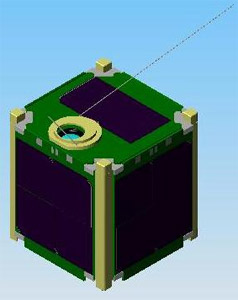
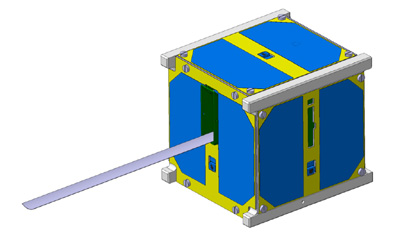
ALMASat-1 (Alma Mater Satellite) is a 12.5 kg technology demonstration microsatellite developed and built by the University of Bologne.
It consists of a 30 cm cube designed as a modular structure, made of six shop-machined Al trays, kept together by eight stainless steel bars. Four Al/Al honeycomb lateral panels, which are the support structure of glued solar panels, complete the satellite structure. This architecture has been selected in order to have a multi-purpose bus, to be used with minor changes for several missions, accommodating payloads with different volume and power requirements.
On this first mission the main objective will be to test the key performance, such as 3-axis pointing accuracy, of this low-cost multipurpose bus in preparation for future missions. Among the possible future applications, there is the on-orbit experimentation of a passive electro-dynamic de-orbiting system, jointly developed by Alenia Spazio (Turin plant) and the University of Rome “la Sapienza”.
The first ALMASat (ALma MAter SATellite) demonstration mission was due for launch on November 2005 on board a Dnepr-1 rocket, but has been delayed to a launch on the maiden Vega flight in early 2011.
To ensure its reentry within 25 years, ALMASat-1 will be deployed into an elliptical orbit with a perigee at 350 km.

It consists of a 30 cm cube designed as a modular structure, made of six shop-machined Al trays, kept together by eight stainless steel bars. Four Al/Al honeycomb lateral panels, which are the support structure of glued solar panels, complete the satellite structure. This architecture has been selected in order to have a multi-purpose bus, to be used with minor changes for several missions, accommodating payloads with different volume and power requirements.
On this first mission the main objective will be to test the key performance, such as 3-axis pointing accuracy, of this low-cost multipurpose bus in preparation for future missions. Among the possible future applications, there is the on-orbit experimentation of a passive electro-dynamic de-orbiting system, jointly developed by Alenia Spazio (Turin plant) and the University of Rome “la Sapienza”.
The first ALMASat (ALma MAter SATellite) demonstration mission was due for launch on November 2005 on board a Dnepr-1 rocket, but has been delayed to a launch on the maiden Vega flight in early 2011.
To ensure its reentry within 25 years, ALMASat-1 will be deployed into an elliptical orbit with a perigee at 350 km.
E-ST@R:
e-st@r is a CubeSat-type nanosatellite built by the Polytechnics Institute of Turin, Italy.
E-ST@R project is an educational and research program which is being carried out at Politecnico di Torino by the AeroSpace System Engineering Team (ASSET). Aim of the project is the development and launch into orbit of the E-ST@R satellite, which is a CubeSat class spacecraft. The project is entirely carried out by students, both graduate and undergraduate, under the supervision of researchers and professors.
Following main scientific objectives and one secondary scientific objective have been identified:
 |
|

E-ST@R project is an educational and research program which is being carried out at Politecnico di Torino by the AeroSpace System Engineering Team (ASSET). Aim of the project is the development and launch into orbit of the E-ST@R satellite, which is a CubeSat class spacecraft. The project is entirely carried out by students, both graduate and undergraduate, under the supervision of researchers and professors.
Following main scientific objectives and one secondary scientific objective have been identified:
- first main scientific objective: development and test of an active Attitude Determination and Control Subsystem (ADCS);
- secondary scientific objective: test of commercial components and materials.
Goliat:
Goliat is a CubeSat type nanosatellite built by the University of Bucharest, Romania.
The 1 kg satellite type is the first Romanian satellite and is considered as a prototype and a platform for exploring the near-Earth environment.
Goliat carries three experiments:
 |
|
The 1 kg satellite type is the first Romanian satellite and is considered as a prototype and a platform for exploring the near-Earth environment.
Goliat carries three experiments:
- Cyclops: a 3-megapixel digital camera that will make images of Earth's surface;
- Sa-mi-ši: a piezo-detector, which egisters micrometeorite impacts;
- DOSE-N: measures radiation levels satellite orbit.
 |
|
MaSat-1:
MaSat-1 (Magyar Satellite) Developed by the Budapest University of Technology and Economics, Hungary.
MaSat 1 (Magyar Satellite 1) is a CubeSat type nanosatellite mission to demonstrate various spacecraft avionics, including a power conditioning system, transceiver and on-board data handling.
This is Hungary’s first satellite.
MaSat 1 (Magyar Satellite 1) is a CubeSat type nanosatellite mission to demonstrate various spacecraft avionics, including a power conditioning system, transceiver and on-board data handling.
This is Hungary’s first satellite.
PW-Sat-1:
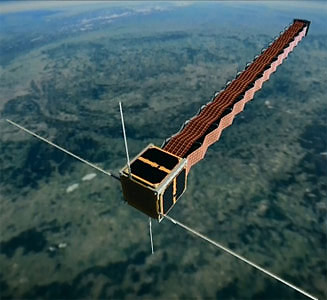
PW-Sat-1 was developed by the Warsaw University of Technology, Poland.
The CubeSat-based satellite will deploy a solar sail as a deployable drag augmentation device in order to accelerate the removal of picosatellites at the end of their missions.
This is Poland’s first satellite.
 |
|
The CubeSat-based satellite will deploy a solar sail as a deployable drag augmentation device in order to accelerate the removal of picosatellites at the end of their missions.
This is Poland’s first satellite.
 |
|
ROBUSTA:
ROBUSTA (Radiation on Bipolar Test for University Satellite Application) is a Cubesat project of the University of Montpellier II, France.
The mission of ROBUSTA is to check the deterioration in flight of electronic components based on bipolar transistors when exposed to space radiation environment for comparison with its own degradation models. The results of this experiment will be used to validate a test method proposed in the laboratory.
The mission of ROBUSTA is to check the deterioration in flight of electronic components based on bipolar transistors when exposed to space radiation environment for comparison with its own degradation models. The results of this experiment will be used to validate a test method proposed in the laboratory.
UniCubeSat-GG:
UniCubeSat-GG (University CubeSat - Gravity Gradient) is nanosatellite by Scuola di Ingegneria Aerospaziale by the Gruppo di Astrodinamica dell'Università degli Studi 'La Sapienza University of Rome' (GAUSS), Italy, carrying a gravity gradient boom.
The main payload of UniCubeSat-GG concerns the study of the gravity gradient enhanced by the presence of two symmetrical deployable booms. The end faces of the booms and the boom elements are equipped with solar panels for additional power generation.
The main payload of UniCubeSat-GG concerns the study of the gravity gradient enhanced by the presence of two symmetrical deployable booms. The end faces of the booms and the boom elements are equipped with solar panels for additional power generation.
Xatcobeo:
Xatcobeo was developed by the University of Vigo, Spain.
This satellite was developed for transporting two payloads: a software defined reconfigurable radio (SRAD) and a system for measuring the amount of ionizing radiation (RDS). There is also an experimental solar panel deployment system (PDM).
This is a joint project between INTA and the University of Vigo, which has been selected as an educational project focused on supplying the students with access to space, a chance that otherwise would not be possible.
The first objective of this project is to learn: teachers, experienced researchers and students will have a unique chance to improve their skills in electronics, communication engineering or software development.
It will test a software-defined reconfigurable radio and an ionising radiation measurement system. It will also test a solar panel deployment system.
This satellite was developed for transporting two payloads: a software defined reconfigurable radio (SRAD) and a system for measuring the amount of ionizing radiation (RDS). There is also an experimental solar panel deployment system (PDM).
This is a joint project between INTA and the University of Vigo, which has been selected as an educational project focused on supplying the students with access to space, a chance that otherwise would not be possible.
The first objective of this project is to learn: teachers, experienced researchers and students will have a unique chance to improve their skills in electronics, communication engineering or software development.
It will test a software-defined reconfigurable radio and an ionising radiation measurement system. It will also test a solar panel deployment system.
Characteristics:
Satellite:
|
LARES
|
ALMASat-1
|
e-st@r
|
Goliat
|
MaSat-1
|
PW-Sat-1
|
ROBUSTA
|
UniCubeSat-GG
|
Xatcobeo
Nation:
|
Italy
|
Italy
|
Italy
|
Romania
|
Hungary
|
Poland
|
France
|
Italy
|
Spain
Type / Application:
|
Basic research, Geodesy
|
Technology
|
Technology
|
Technology
|
Technology
|
Technology
|
Technology
|
Technology, aeronomy
|
Technology
Operator:
|
ASI
|
University of Bologna
|
Politecnico di Torino
|
University of Bucharest
|
Budapest University of Technology and Economics
|
Warsaw University of Technology, Space Research Centre
|
University of Montpellier II
|
GAUSS (La Sapienza University of Rome)
|
INTA, Universidade de Vigo
Contractors:
|
Carlo Gavazzi Space SpA
|
University of Bologna
|
Politecnico di Torino; Pumpkin, Inc. (bus)
|
University of Bucharest; Pumpkin, Inc. (bus)
|
Budapest University of Technology and Economics
|
Warsaw University of Technology, Space Research Centre
|
University of Montpellier II
|
GAUSS (La Sapienza University of Rome)
|
INFN Trieste; Pumpkin, Inc. (bus)
Equipment:
|
92 cube corner reflectors
|
|
|
Cyclops, Sa-mi-ši, DOSE-N
|
|
deployable flexible solar array/sail
|
|
2 gravity gradient booms
||
Configuration:
|
37.6 cm sphere
|
Cube
|
CubeSat (1U)
|
CubeSat (1U)
|
CubeSat (1U)
|
CubeSat (1U)
|
CubeSat (1U)
|
CubeSat (1U)
|
CubeSat (1U)
Propulsion:
|
None
|
None
|
|
None
|
|
|
|
|
Power:
|
None
|
Solar cells, batteries
|
Solar cells, batteries
|
Solar cells, batteries
|
Solar cells, batteries
|
Solar cells, batteries
|
Solar cells, batteries
|
2 deployable fixed solar arrays, solar cells, batteries
|
Solar cells, batteries
Lifetime:
|
|
|
|
|
21 days
|
|
|
|
Mass:
|
~ 400 kg
|
12.5 kg
|
1 kg
|
1 kg
|
1 kg
|
1 kg
|
1 kg
|
1 kg
|
1 kg
Orbit:
|
1200 km × 1200 km, 71°
|
|
|
|
|
|
|
|
Launch Vehicle:
 |
|
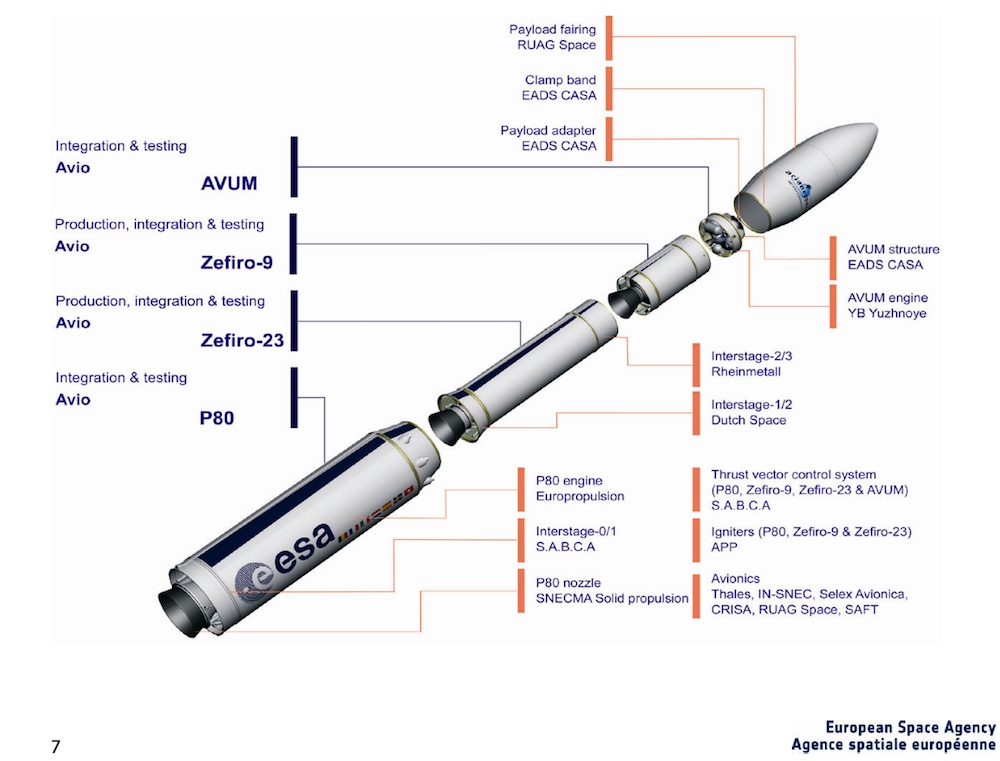
Vega is an ESA project for a small, solid-fueled launcher for low earth orbit payloads. It is compatible with payload masses ranging from 300 kg to 2500 kg, depending on the type and altitude of the orbit required by the customers. The benchmark is for 1500 kg into a 700 km-altitude polar orbit.
The first stage was originally a two-segment version of the Ariane-5 booster, but later in the development process a complete new first stage was developed. The second and third stages will be versions of the italian Zefiro motor. A liquid fuel propulsion module will form stage 4, which is powered by a russian RD-869 engine of R-36M2 heritage.
Due to the reignitable 4th stage, Vega is able to place multiple payloads into orbit. In particular, it offers configurations able to handle payloads ranging from a single satellite up to one main satellite plus eight microsatellites.
Propulsion:
|
P80FW
|
Zefiro-Z23
|
Zefiro-Z9
|
AVUM / RD-869
Height:
|
10.5 m
|
7.5 m
|
3.85 m
|
1.74 m
Diameter:
|
3 m
|
1.9 m
|
1.9 m
|
1.9 m
Propellant mass:
|
88 t
|
23.9 t
|
10.1 t
|
0.55 t
Thrust (max):
|
3 040 kN
|
1 200 kN
|
213 kN
|
2.45 kN
Nozzle expansion ratio:
|
16
|
25
|
56
|
Burn time:
|
107 s
|
71.6 s
|
117 s
|
315.2 s
Performance (kg):
LEO
|
LPEO
|
SSO
|
GTO
|
GEO
|
MolO
|
IP
2300
|
1740
|
|
|
|
|
Rocket stages:
The P80FW stage:
The Zefiro stages:
AVUM:
The first stage of Vega is based on a large monolithic motor with a load of 88 365 kg of HTPB solid propellant. The motor delivers 2261 kN of thrust at sea level and burns for 114.3 seconds before being jettisoned at an altitude of 61 km.
The stage features two major new technologies in order to reduce the vehicle’s mass:
The P80FW shares a 3 m diameter with Ariane 5’s EAP solid boosters; its 11.2 m overall length is similar to one of EAP’s largest segments. The same Ariane 5 facilities and equipment at the Guiana Propellant Plant, next to the spaceport, are used for the P80FW propellant loading and transport. The stage’s nozzle is also an evolution from that of the Ariane 5 boosters.
Main features:
 |
|
The stage features two major new technologies in order to reduce the vehicle’s mass:
- A carbon-epoxy filament-wound motor casing, the largest in the world for a monolithic motor;
- Electromechanical actuators for thrust vectoring, a world’s first for a motor of this size.
The P80FW shares a 3 m diameter with Ariane 5’s EAP solid boosters; its 11.2 m overall length is similar to one of EAP’s largest segments. The same Ariane 5 facilities and equipment at the Guiana Propellant Plant, next to the spaceport, are used for the P80FW propellant loading and transport. The stage’s nozzle is also an evolution from that of the Ariane 5 boosters.
Main features:
- motor length: 11.7m
- diameter: 3m
- propellant mass: 88 t
- motor dry mass: 7 330 kg
- motor case mass: 3 260 kg
- average thrust: 2 200 kN
- specific impulse: 280 sec
- combustion time: 110 sec
The Zefiro stages:
Vega’s second and third stages are based on Zefiro solid-propellant motors developed by Avio from its earlier Zefiro-Z16 ground-qualified motor. Both motors are 1.9 m in diameter with a carbon-epoxy filament-wound motor casing, low-density EPDM insulation and a flexible joint nozzle with electromechanical actuators for thrust vector control.
The 8.39 m-long Zefiro-Z23 is loaded with 23 906 kg of HTPB 1912 solid propellant and delivers 1196 kN of thrust at sea level. It burns for 86.7 seconds.
The 4.12 m-long Zefiro-Z9A is loaded with 10 115 kg of HTPB 1912 solid propellant and delivers a maximum thrust of 313 kN in vacuum. Although it is Vega’s smallest solid-propellant motor, it has the longest burn time: 128.6 seconds. The Zefiro-Z9A also features the highest mass fraction for solid motors in this category.
The Zefiro stages are produced by Avio in its facilities in Colleferro, near Rome, Italy. They are loaded with solid propellant before their shipment to the spaceport.
Zefiro-Z23 main features:
 |
|
Zefiro-Z9 main features:
 |
|
The 8.39 m-long Zefiro-Z23 is loaded with 23 906 kg of HTPB 1912 solid propellant and delivers 1196 kN of thrust at sea level. It burns for 86.7 seconds.
The 4.12 m-long Zefiro-Z9A is loaded with 10 115 kg of HTPB 1912 solid propellant and delivers a maximum thrust of 313 kN in vacuum. Although it is Vega’s smallest solid-propellant motor, it has the longest burn time: 128.6 seconds. The Zefiro-Z9A also features the highest mass fraction for solid motors in this category.
The Zefiro stages are produced by Avio in its facilities in Colleferro, near Rome, Italy. They are loaded with solid propellant before their shipment to the spaceport.
Zefiro-Z23 main features:
- motor length: 7.5 m
- diameter: 1.9 m
- propellant mass: 24 t
- motor dry mass: 1 950 kg
- motor case mass: 900 kg
- average thrust: 871 kN
- ppecific impulse: 287.5 sec
- combustion time: 77 sec
Zefiro-Z9 main features:
- motor length: 3.5 m
- diameter: 1.9 m
- propellant mass: 10.5 t
- motor dry mass: 915 kg
- motor case mass: 400 kg
- average thrust: 260 kN
- pecific impulse: 296 sec
- combustion time: 120 s
AVUM:
The AVUM (Attitude Vernier Upper Module) stage is composed of two different sections, one housing the propulsion elements (APM: AVUM Propulsion Module) and one dedicated to the avionics equipment housing platform (AAM: AVUM Avionics Module).
The Attitude and Vernier Upper Module has a bipropellant propulsion system for orbital injection, and a monopropellant propulsion system for controlling the vehicle’s roll and the attitude.
The APM provides for the attitude control functions and axial thrust of the Vega launcher during the final phases of flight, in accordance with the requisites of the mission.
AVUM’s primary mission begins at the end of the solid-propulsion phase, when it starts manoeuvring to reach the targeted deployment orbit with high accuracy. AVUM is designed to deliver different payloads into different orbits and to perform fine satellite pointing before separation. At the end of the mission, it is disposed of safely to limit orbital debris.
AVUM carries 550 kg of propellant (UDMH/NTO) in four tanks and is powered by a restartable 2.45 kN RD-869 engine. The total propellant load is 250-400 kg, depending on the definition of the configuration and mission to be carried out. It incorporates two clusters of three monopropellant thrusters for roll and attitude control, and accommodates the Vega avionics module, which provides flight control and mission management, telemetry, flight termination, power supply and distribution.
The current basic configuration includes the adoption of a bi-liquid propellant for primary manoeuvres, which uses Tetroxide Nitrogen (NTO) as oxidant and asymmetric monomethyl-hydrazine (UDMH) as a propellant, both fuelled by pressured helium gas, and a cold nitrogen gas system (GN2) for attitude control.
The AMM avionics module houses the main components of the avionics sub-system of the launch vehicle.
Features of AVUM:
 |
|
The Attitude and Vernier Upper Module has a bipropellant propulsion system for orbital injection, and a monopropellant propulsion system for controlling the vehicle’s roll and the attitude.
The APM provides for the attitude control functions and axial thrust of the Vega launcher during the final phases of flight, in accordance with the requisites of the mission.
AVUM’s primary mission begins at the end of the solid-propulsion phase, when it starts manoeuvring to reach the targeted deployment orbit with high accuracy. AVUM is designed to deliver different payloads into different orbits and to perform fine satellite pointing before separation. At the end of the mission, it is disposed of safely to limit orbital debris.
AVUM carries 550 kg of propellant (UDMH/NTO) in four tanks and is powered by a restartable 2.45 kN RD-869 engine. The total propellant load is 250-400 kg, depending on the definition of the configuration and mission to be carried out. It incorporates two clusters of three monopropellant thrusters for roll and attitude control, and accommodates the Vega avionics module, which provides flight control and mission management, telemetry, flight termination, power supply and distribution.
The current basic configuration includes the adoption of a bi-liquid propellant for primary manoeuvres, which uses Tetroxide Nitrogen (NTO) as oxidant and asymmetric monomethyl-hydrazine (UDMH) as a propellant, both fuelled by pressured helium gas, and a cold nitrogen gas system (GN2) for attitude control.
The AMM avionics module houses the main components of the avionics sub-system of the launch vehicle.
Features of AVUM:
- motor length: 1.7 m
- diameter: 2.31 m
- propellant mass: 0.55 t
- motor dry mass: 131 kg
- motor case mass: 16 kg
- average thrust: 2.42 kN
- specific impulse: 315.5 sec
- combustion time: 6.672 s
Mission highlights:
The main qualification objectives for the launch vehicle include the liftoff kinematics with respect to the pad interfaces, the ignition, performance, flight control, thrust vector control and separation of all three solid stages, the fairing separation, AVUM performance and restart capability, payload release manoeuvres and accuracy and finally AVUM passivation at the end of the mission with a deorbiting manoeuvre to comply with debris mitigation policies.
To monitor all these events during the flight, the VV01 launcher carries extra sets of sensors and three telemetry systems to download data in real time to the ground. These data will be processed after the flight to identify possible discrepancies. As a demonstrator for new technologies, the first stage has its own set of sensors with a dedicated telemetry system.
In order to prepare for future operational flights, the LARES payload platform carries a set of sensors, including accelerometers, acoustic sensors and cameras to monitor the payload environment during the flight.
The vehicle is not the only system to be qualified with this mission. All ground systems and launch procedures will be qualified simultaneously. This includes payload processing and integration, launcher acceptance via the readiness control checks with a simulated countdown and mission sequence, final prelaunch readiness checks via the automatic sequences during the final countdown, readiness check of the launch base and of all support means needed during the flight (weather forecast, telemetry downlink stations, tracking stations, flight termination).
Vega’s AVUM Attitude and Vernier Upper Module will reach a circular orbit at an altitude of 1450 km and an inclination of 69.5° to the equator in order to release LARES. Then, it will manoeuvre to lower the perigee to 350 km before deploying the other payloads.
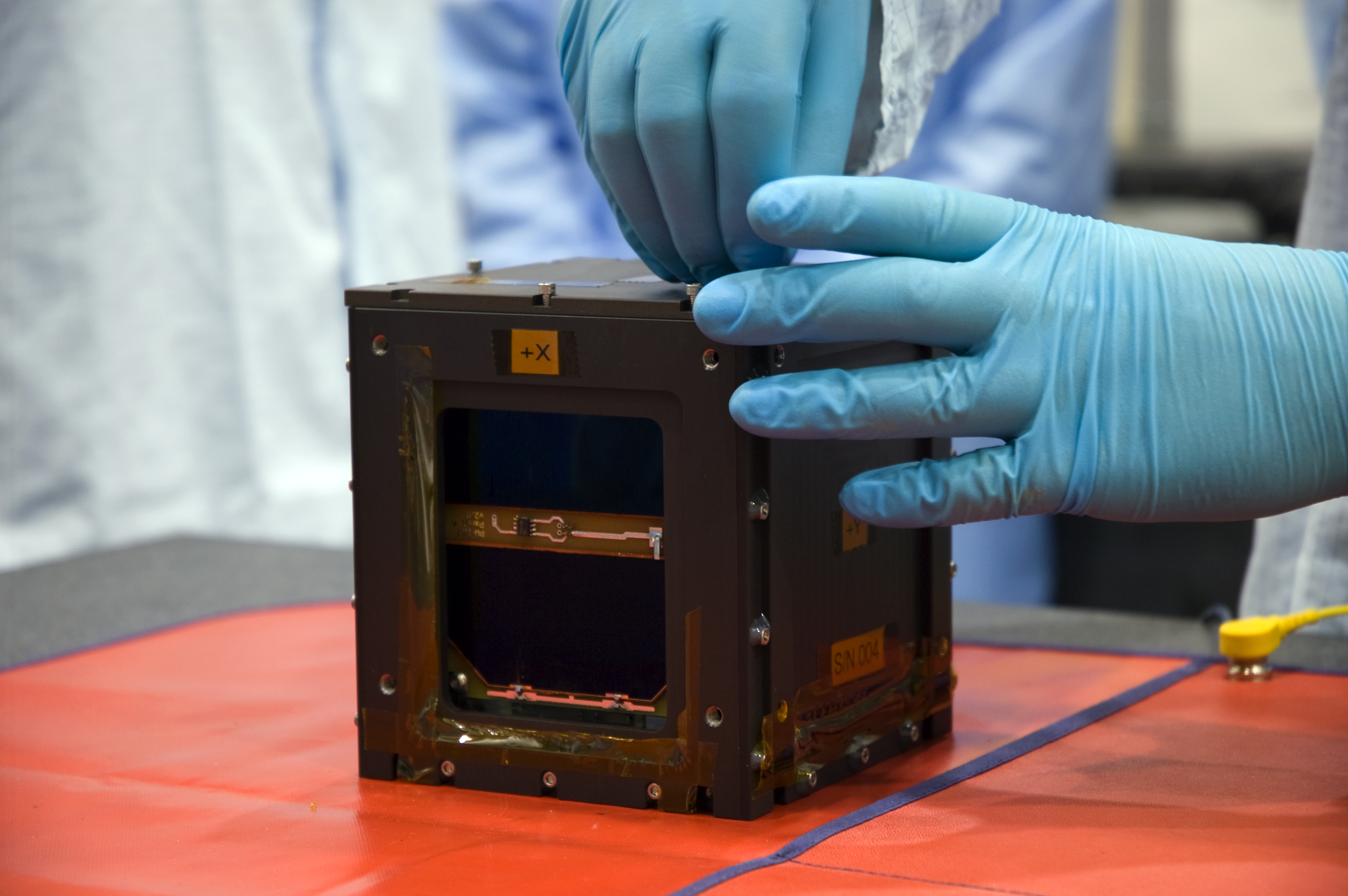
Seven picosatellites sharing the same CubeSat design (1 kg, 1 W, 10 cm cubic structure) developed by universities from ESA member or cooperating states were selected within European universities on behalf of ESA’s Education programme. They will be released by three P-PODs (Poly-Picosatellite Orbital Deployers) mounted on the LARES structure into an elliptical orbit with a 350 km perigee that will ensure their safe reentry within 12 years.
The mission will qualify the overall Vega system, including the vehicle itself, its launch infrastructure and the operational procedures from the launch campaign up to the payload separation and disposal of AVUM.
To monitor all these events during the flight, the VV01 launcher carries extra sets of sensors and three telemetry systems to download data in real time to the ground. These data will be processed after the flight to identify possible discrepancies. As a demonstrator for new technologies, the first stage has its own set of sensors with a dedicated telemetry system.
In order to prepare for future operational flights, the LARES payload platform carries a set of sensors, including accelerometers, acoustic sensors and cameras to monitor the payload environment during the flight.
The vehicle is not the only system to be qualified with this mission. All ground systems and launch procedures will be qualified simultaneously. This includes payload processing and integration, launcher acceptance via the readiness control checks with a simulated countdown and mission sequence, final prelaunch readiness checks via the automatic sequences during the final countdown, readiness check of the launch base and of all support means needed during the flight (weather forecast, telemetry downlink stations, tracking stations, flight termination).
Vega’s AVUM Attitude and Vernier Upper Module will reach a circular orbit at an altitude of 1450 km and an inclination of 69.5° to the equator in order to release LARES. Then, it will manoeuvre to lower the perigee to 350 km before deploying the other payloads.
Seven picosatellites sharing the same CubeSat design (1 kg, 1 W, 10 cm cubic structure) developed by universities from ESA member or cooperating states were selected within European universities on behalf of ESA’s Education programme. They will be released by three P-PODs (Poly-Picosatellite Orbital Deployers) mounted on the LARES structure into an elliptical orbit with a 350 km perigee that will ensure their safe reentry within 12 years.
The mission will qualify the overall Vega system, including the vehicle itself, its launch infrastructure and the operational procedures from the launch campaign up to the payload separation and disposal of AVUM.
Launch campaign:
Date
|
Event
13-14 Oct 2011
|First Flight Readiness Review #124 Oct 2011
|Vega VV01 stages and LARES satellite arrive in Kourou Harbour26 Oct 2011
|Delivery of LARES to S1B payload processing facilitylate Nov 2011
|Delivery of P-PODS and CubeSats in Kourou7 Nov 2011
|Start of launch campaign7 Nov 2011
|P80FW transferred to the ZLV and installed on the pad2 Dec 2011
|Zefiro-Z23 stage stacked7 Dec 2011
|Flight Readiness Review #29 Dec 2011
|Zefiro-Z9A stage stacked12–14 Dec 2011
|P-PODs integrated on LARES adapter16 Dec 2011
|AVUM transfer to launch pad and mating13 Jan 2012
|Final checkout activities19 Jan 2012
|Start of combined operations21 Jan 2012
|Upper composite transfered to launch pad and mated26 Jan 2012
|First gantry rollback1 Feb 2012
|Launch countdown rehearsal3-6 Feb 2012
|AVUM propellant loading and pressurisation12 Feb 2012
|Arming of vehicle13 Feb 2012
|Launch countdownCountdown & Launch timeline:
T [HH:MM:SS]
|
Event
|
Alt. [km]
|
Vel. [m/s]
–07:45:00
|
Start of Countdown
|
|
{colsp=4}
The final countdown begins with functional checks of the rocket.
–06:45:00
|
Verification of Communications Links
|
|
{colsp=4}
Launch controllers verify communications, tracking and telecommand links between the Vega rocket and ground facilities at the Guiana Space Center.
–05:40:00
|
Launcher Powered On
|
|
{colsp=4}
Systems on the Vega launcher are powered on for health checks.
–04:20:00
|
Inertial Platform Alignment
|
|
{colsp=4}
The 98-foot-tall rocket's inertial navigation platform is aligned for flight.
–02:40:00
|
Gantry Rollback
|
|
{colsp=4}
The mobile service gantry, which stands 16 stories tall, is retracted about 260 feet away from the Vega rocket at the ZLV launch complex at the Guiana Space Center.
–00:44:00
|
Ready for Final Countdown
|
|
{colsp=4}
Engineers conduct another check of Vega's systems before the beginning of the computer-controlled synchronized sequence.
–00:03:30
|
All systems go, start of synchronised sequence
|
|
{colsp=4}
Computers assume command of the countdown in the final minutes, making thousands of checks to ensure all systems are ready for liftoff.
+00:00:00
|
P80 ignition
|
|
{colsp=4}
The Vega rocket's first stage P80 solid rocket motor ignites and powers the 98-foot-tall booster off the launch pad 0.3 seconds later. The P80 first stage motor generates a maximum of 683,000 pounds of thrust.
+00:00:00.3
|
Liftoff
|
0
|
0
{colsp=4}
Liftoff of the Vega rocket from the pad.
+00:00:30.7
|
Transonic (Mach 1)
|
4.7
|
332
{colsp=4}
The Vega rocket surpasses the speed of sound.
+00:00:53
|
Maximum dynamic pressure
|
13
|
586
{colsp=4}
Flying at an altitude of more than 40,000 feet, the rocket passes through the phase of maximum aerodynamic pressure.
+00:01:54.8
|
P80 shut down and separation
|
60
|
1700
{colsp=4}
Having consumed its 194,000 pounds of solid propellant, the 9.8-foot-diameter P80 first stage motor is jettisoned at an altitude of 37 miles.
+00:01:55.6
|
Zefiro-23 ignition
|
61
|
1700
{colsp=4}
The Vega rocket's Zefiro 23 second stage motor fires to begin an 87-second burn.
+00:03:22.3
|
Zefiro-23 shut down and separation
|
127
|
3800
{colsp=4}
The Zefiro 23 motor burns out and jettisons at an altitude of 79 miles.
+00:03:38.5
|
Zefiro-9 ignition
|
135
|
3800
{colsp=4}
Moving at a velocity of 8,500 mph, the Vega rocket's third stage Zefiro 9 motor ignites for a 129-second firing.
+00:03:43.5
|
Fairing separation
|
138
|
3900
{colsp=4}
The Vega's 8.5-foot-diameter payload fairing is released as the rocket ascends into the upper atmosphere more than 85 miles high.
+00:05:47.1
|
Zefiro-9 shut down and separation
|
182
|
7700
{colsp=4}
The Zefiro 9 third stage shuts down and separates, having accelerated the rocket to nearly orbital velocity.
+00:05:54.1
|
AVUM 1st boost
|
185
|
7700
{colsp=4}
The Vega rocket's Attitude and Vernier Module, or fourth stage, ignites for the first time. The AVUM burns hydrazine fuel with an RD-869 engine provided by Yuzhnoye of Ukraine.
+00:08:45
|
AVUM shut down, injection into transfer orbit
|
260
|
7800
{colsp=4}
The Vega's AVUM fourth stage is turned off after a 3-minute burn, beginning a nearly 40-minute coast until the engine is ignited again. The first AVUM burn places the rocket and its payloads in a parking orbit.
+00:48:07.3
|
AVUM 2nd boost
|
1447
|
6600
{colsp=4}
After coasting to an altitude of 900 miles, the AVUM fires a second time to circularize its orbit.
+00:52:10.5
|
AVUM shut down, injection into primary target orbit
|
1450
|
6900
{colsp=4}
The AVUM engine shuts down after reaching a circular 900-mile-high orbit (1,450 kilometers) with an inclination of approximately 70 degrees.
+00:55:05.5
|
LARES separation
|
1450
|
6900
{colsp=4}
The Laser Relativity Satellite, or LARES, is deployed from the Vega rocket's AVUM upper stage.
+01:06:10.5
|
AVUM 3rd boost
|
1457
|
6900
{colsp=4}
The AVUM fires a third time to lower the perigee of its orbit to 217 miles, or 350 kilometers.
+01:10:34.3
|
AVUM shut down
|
1458
|
6600
{colsp=4}
The Vega rocket's AVUM liquid-fueled fourth stage shuts down for the final time of the mission. The AVUM is designed for up to five burns.
+01:10:35.3
|
ALMASat-1 and CubeSats separation
|
1458
|
6600
{colsp=4}
Italy's ALMASat 1 remote sensing technology demonstration satellite and seven small CubeSat payloads begin separating from the Vega upper stage.
+01:21:00.3
|
End of mission
|
1344
|
6700
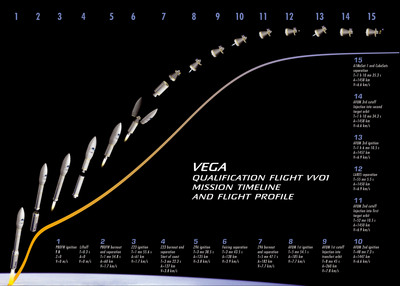
Click on image to enlarge
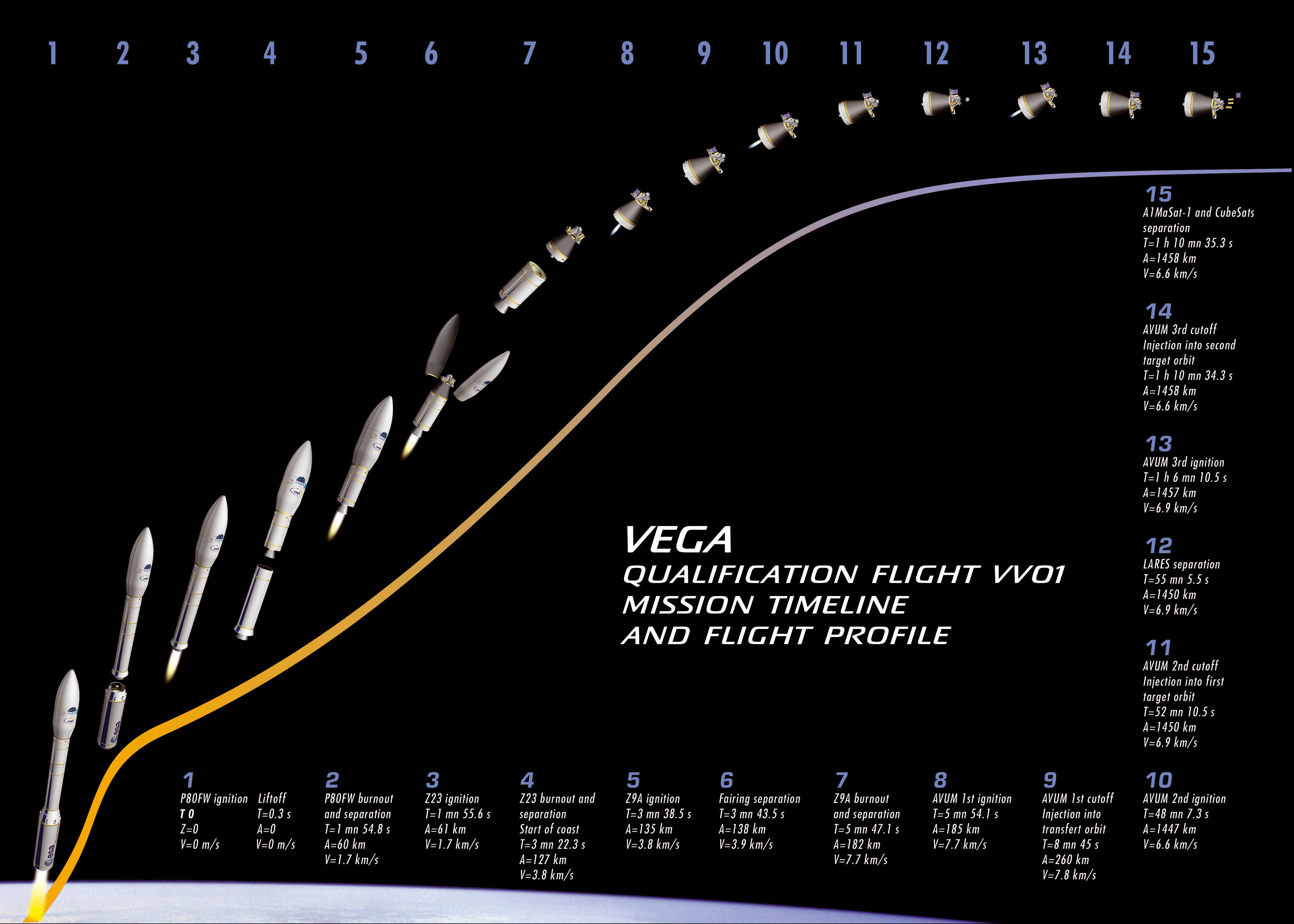
Vega VV01 mission timeline and flight profile
Credits: ESA - J. Huart, 2012
Links:
- Orbiter-Forum:
- ESA:
- Vega rocket information page
- Flight overview
- LARES: Laser Relativity Satellite
- ALMASat-1: ALma MAter SATellite
- CubeSats
- Launch campaign
- Mission timeline
- Watch online: Vega qualification flight
- Vega VV01 launch campaign (PHOTO GALLERY)
- Vega VV01 flickr photo page (PHOTO GALLERY)
- Press Releases:
- 2011-11-11: First Vega launch campaign aims for January liftoff
- 2011-11-14: ESA Cubs delivered for first Vega flight
- 2011-12-15: Vega moves closer to its first liftoff
- 2011-12-16: ESA’s CubeSats ready for flight
- 2012-01-19: Vega rocket ready for first flight
- 2012-01-26: ESA’s CubeSats near the end of a five year journey
- 2012-01-27: First Vega rocket assembled on launch pad
- 2012-02-03: Vega set for its inaugural flight
- 2012-02-12: Final ‘go’ for Vega launch
- Press Kit:
- Vega fact sheet (PDF)
- Vega flyer
- Arianespace - Mission Updates:
- 2011-10-25: Vega arrives at French Guiana in preparation for its January 26 inaugural launch
- 2012-01-26: Vega's first flight: Assembly is completed for the no. 1 launcher
- 2012-02-03: Vega's inaugural flight is set for February 13 at the Spaceport
- Avio:
- Spaceflight Now:
- Mission Status Center
- Vega launcher overview
- Vega countdown timeline
- Vega launch timeline
- Italian satellite to help measure space-time warp
- PHOTOS: Payload shroud hoisted atop Vega rocket (PHOTO GALLERY #1)
- PHOTOS: Countdown rehearsal for Vega rocket (PHOTO GALLERY #2)
- PHOTOS: Countdown rehearsal for Vega rocket (PHOTO GALLERY #3)
- Gunter's Space Page:
- Vega launch vehicle info page
- LARES spacecraft info page
- ALMASat 1 spacecraft info page
- e-st@r spacecraft info page
- Goliat spacecraft info page
- MaSat 1 spacecraft info page
- PW-Sat 1 spacecraft info page
- ROBUSTA spacecraft info page
- UniCubeSat-GG spacecraft info page
- XaTcobeo spacecraft info page
- NASASpaceflight:
- Europe’s new launch vehicle Vega ready for debut trip into space
- ESA and Arianespace closing in on Vega’s debut launch
- Alma Mater Sudiorum Univerista Di Bologna Dede Di Forli: ALMASat-1
- Aganzia Spaziale Italiana: LARES
- Science Watch: Ignazio Ciufolini on the First Accurate Test and Direct Measurement of Gravitomagnetism
- MessageToEagle.com:LARES Satellite Prepared For Its Mission
- Parabolic Arc: ESA to Webcast First Vega Launch on Monday
- SPACE.com: Europe's Newest Rocket to Launch on Maiden Voyage Monday
- NewScientist: LARES 'mirror ball' sat will test Einstein's theory












