Thread 1 "Orbiter" received signal SIGABRT, Aborted.
0x00007ffff79c90fc in ?? () from /lib/x86_64-linux-gnu/libc.so.6
(gdb) bt
#0 0x00007ffff79c90fc in ?? () from /lib/x86_64-linux-gnu/libc.so.6
#1 0x00007ffff797b472 in raise () from /lib/x86_64-linux-gnu/libc.so.6
#2 0x00007ffff79654b2 in abort () from /lib/x86_64-linux-gnu/libc.so.6
#3 0x00007ffff79661ed in ?? () from /lib/x86_64-linux-gnu/libc.so.6
#4 0x00007ffff79d2a75 in ?? () from /lib/x86_64-linux-gnu/libc.so.6
#5 0x00007ffff79d4782 in ?? () from /lib/x86_64-linux-gnu/libc.so.6
#6 0x00007ffff79d716f in free () from /lib/x86_64-linux-gnu/libc.so.6
#7 0x00007ffff7104707 in VBMESH::~VBMESH() () from Modules/Plugin/libOGLClient.so
#8 0x00007ffff70d8c4c in __tcf_9 () from Modules/Plugin/libOGLClient.so
#9 0x00007ffff797d955 in ?? () from /lib/x86_64-linux-gnu/libc.so.6
#10 0x00007ffff797da8a in exit () from /lib/x86_64-linux-gnu/libc.so.6
#11 0x000055555576e1d5 in CelestialBody::RegisterModule(char*) ()
#12 0x000055555576ac03 in CelestialBody::CelestialBody(char*) ()
#13 0x000055555576f231 in Planet:

lanet(char*) ()
#14 0x0000555555737335 in PlanetarySystem::ScanMoons(std::basic_istream<char, std::char_traits<char> >&, CelestialBody*, char*) ()
#15 0x0000555555735d60 in PlanetarySystem::Read(char*) ()
#16 0x0000555555734e31 in PlanetarySystem:
lanetarySystem(char*) ()
#17 0x000055555571f2af in Orbiter::InitializeWorld(char*) ()
#18 0x0000555555720f59 in Orbiter::StartSession(Config*, char const*) ()
#19 0x0000555555720d96 in Orbiter::Launch(char const*) ()
#20 0x000055555574988d in DlgLaunchpad:

rawScenarios() ()
#21 0x000055555574965f in DlgLaunchpad::Show() ()
#22 0x000055555586638e in GUIManager::RenderGUI() ()
#23 0x00005555557224fc in Orbiter::RenderGUI() ()
#24 0x000055555572282f in Orbiter::Run() ()
#25 0x000055555571f11a in main ()
(gdb) Quit
(gdb)
")

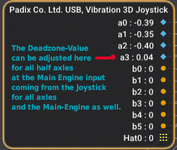
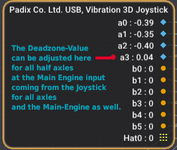
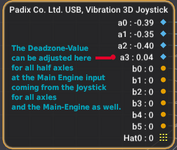
 is on one false axle. And some lantation moves are not right.
is on one false axle. And some lantation moves are not right.