Is there a chance if there will be a beta version of this?
-
ORBITER-FORUM will be temporarily closed at 2026-07-23 18:00 UTC while we complete some OF maintenance tasks. The amount of downtime is expected to take up to one hour, but probably less.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Project MoonBaseAlpha for 2016
- Thread starter gattispilot
- Start date
Not yet. Still got to fix things
We are experience limits in Orbiter. For instance we just attachments for the module and buggy. But because we are using the cockpit view. You have to set the mesh flags. to extpass but then you see thru the ship.
As far as TD points.
As far as TD points.
static const DWORD ntdvtx_geardown = 16;
static TOUCHDOWNVTX tdvtx_geardown[ntdvtx_geardown] = {
{ _V(0, -3.12312, 2), 26150800, 18409627, 1.6, 0.1 },
{ _V(-2, -3.12312, -2), 26150800, 18409627, 3.0, 0.2 },
{ _V(2, -3.12312, -2), 26150800, 18409627, 3.0, 0.2 },
{_V(-7.7, 0 ,-0.4), 3e7, 3e6, 3},
{_V(7.7, 0 ,-0.4), 3e7, 3e6, 3},
{_V(-1.5, 3 ,13.5), 3e7, 3e6, 3},
{_V(1.5, 3 ,13.5), 3e7, 3e6, 3},
{_V(-1.3, 2.8 ,17), 3e7, 3e6, 3},
{_V(1.3, 2.8 ,17), 3e7, 3e6, 3},
{_V(-1.8, 0 ,18.3), 3e7, 3e6, 3},
{_V(1.8, 0 ,18.3), 3e7, 3e6, 3},
{_V(-1.9, 2.2 ,-13.8), 3e7, 3e6, 3},
{_V(1.9, 2.2 ,-13.8), 3e7, 3e6, 3},
{_V(-3.3, 0 ,-14.9), 3e7, 3e6, 3},
{_V(3.3, 0 ,-14.9), 3e7, 3e6, 3}
};
Well if you need any beta testing, i'll be happy to do some!
Working on the HUD thrust/fuel level
I got the main thrusters to show.
but retros
I have this:
double retrolevel = GetThrusterLevel(th_retro[0]);//get retro level but it shows 0 even though are firing.
I got the main thrusters to show.
but retros
I have this:
double retrolevel = GetThrusterLevel(th_retro[0]);//get retro level but it shows 0 even though are firing.
Confused;(
Looking at the source code. But I can't get it to draw a yellow box for retro.
as I understand if main thrusts are fired then level is 1 if retro then it is -1
SOURCE
If main are fired the th and engmain are 1. but retro get 0
Not sure about this.
Also switching view in vc doesn't update the texture??
Looking at the source code. But I can't get it to draw a yellow box for retro.
as I understand if main thrusts are fired then level is 1 if retro then it is -1
th = GetThrusterGroupLevel(THGROUP_MAIN);
if (!th) th = GetThrusterGroupLevel(THGROUP_RETRO);
//main
if (th != engmain) {
engmain = th;
if (th >= 0.0) {
//draw thrust level
SelectObject(hDC, g_Param.hBrush[1]);//green box
Rectangle(hDC, 130, 144, (int)(130 + engmain * (200)), 187);//thrust
}
//retro
else {
SelectObject(hDC, g_Param.hBrush[2]);//yellow box
Rectangle(hDC, 130, 144, (int)(130 + engmain * (200)), 187);//retrothrust
}
}
sprintf(oapiDebugString(), "main %5f th %5f ", engmain, th);
SOURCE
// Update main engine status
vofs += 4;
double th = g_focusobj->GetThrusterGroupLevel(THGROUP_MAIN);
if (!th) th = -g_focusobj->GetThrusterGroupLevel(THGROUP_RETRO);
if (th != engmain) {
engmain = th;
if (th >= 0.0) {
grp->Vtx[vofs].x = grp->Vtx[vofs+2].x = dx+46.0f*scale;
grp->Vtx[vofs+1].x = grp->Vtx[vofs+3].x = dx+(float)((46.0+engmain*94.0)*scale);
for (i = 0; i < 4; i++) grp->Vtx[vofs+i].tu = 4.0f/texw;
} else {
grp->Vtx[vofs].x = grp->Vtx[vofs+2].x = dx+(140.0f+(float)engmain*94.0f)*scale;
grp->Vtx[vofs+1].x = grp->Vtx[vofs+3].x = dx+140.0f*scale;
for (i = 0; i < 4; i++) grp->Vtx[vofs+i].tu = 6.0f/texw;
}
}
If main are fired the th and engmain are 1. but retro get 0
Not sure about this.
// Update main engine readout
vofs += 4*5;
th = (engmain >= 0.0 ? engmain*g_focusobj->GetThrusterGroupMaxth(THGROUP_MAIN) :
-engmain*g_focusobj->GetThrusterGroupMaxth(THGROUP_RETRO));
Also switching view in vc doesn't update the texture??
Attachments

Here is the source code
then mine code
but all I ever get is Th as 0 when retro are fired. Should it be -1. and then we have the negative sign so that would be 1?
so when main thrusters are fired GetThrusterGroupLevel(THGROUP_MAIN)=1.
so when retro thrusters are fired GetThrusterGroupLevel(THGROUP_RETRO)=-1.
But that negative GetThrusterGroupLevel(THGROUP_RETRO) makes it 1, right
But all I get for retro is 0
// Update main engine status
vofs += 4;
double th = g_focusobj->GetThrusterGroupLevel(THGROUP_MAIN);
if (!th) th = -g_focusobj->GetThrusterGroupLevel(THGROUP_RETRO);
if (th != engmain) {
engmain = th;
if (th >= 0.0) {
grp->Vtx[vofs].x = grp->Vtx[vofs+2].x = dx+46.0f*scale;
grp->Vtx[vofs+1].x = grp->Vtx[vofs+3].x = dx+(float)((46.0+engmain*94.0)*scale);
for (i = 0; i < 4; i++) grp->Vtx[vofs+i].tu = 4.0f/texw;
} else {
grp->Vtx[vofs].x = grp->Vtx[vofs+2].x = dx+(140.0f+(float)engmain*94.0f)*scale;
grp->Vtx[vofs+1].x = grp->Vtx[vofs+3].x = dx+140.0f*scale;
for (i = 0; i < 4; i++) grp->Vtx[vofs+i].tu = 6.0f/texw;
}
}
then mine code
th = GetThrusterGroupLevel(THGROUP_MAIN); //get thrust main level
if (!th) th = -GetThrusterGroupLevel(THGROUP_RETRO); //get retro thrustes - 1 to 0
but all I ever get is Th as 0 when retro are fired. Should it be -1. and then we have the negative sign so that would be 1?
so when main thrusters are fired GetThrusterGroupLevel(THGROUP_MAIN)=1.
so when retro thrusters are fired GetThrusterGroupLevel(THGROUP_RETRO)=-1.
But that negative GetThrusterGroupLevel(THGROUP_RETRO) makes it 1, right
But all I get for retro is 0
Got the vc fixed.
But get a weird crash result. The eagle will go underground. Not sure if a Touchdown issues or what?
I have this to adjust if the gear is up. But it does it when the gear is down??
But get a weird crash result. The eagle will go underground. Not sure if a Touchdown issues or what?
static const DWORD ntdvtx_geardown = 8;
static TOUCHDOWNVTX tdvtx_geardown[ntdvtx_geardown] = {
{ _V(0, -3.12312, 10), 26150800, 18409627, 1.6, 0.1 },
{ _V(-6, -3.12312, -10), 26150800, 18409627, 3.0, 0.2 },
{ _V(6, -3.12312, -10), 26150800, 18409627, 3.0, 0.2 },
{_V(-6.6, -0.5 ,-12), 3e7, 3e6, 3},
{_V(6.6, -.5 ,-12), 3e7, 3e6, 3},
{_V(0, 0 ,-16), 3e7, 3e6, 3},
{_V(0, 3.2 ,0), 3e7, 3e6, 3},
{_V(0, 0 ,16.7), 3e7, 3e6, 3},
};
SetTouchdownPoints(tdvtx_geardown, ntdvtx_geardown);I have this to adjust if the gear is up. But it does it when the gear is down??
SetTouchdownPoints(_V(0, -3.12312 + GEAR_proc * 1.5, 8.7), _V(-2, -3.12312 + GEAR_proc * 1.5, -9.6), _V(2, -3.12312 + GEAR_proc * 1.5, -9.6));
Buck Rogers
Major Spacecadet
- Joined
- Feb 26, 2013
- Messages
- 1,232
- Reaction score
- 1,648
- Points
- 128
Having thought over it, I noticed your damping is maybe the problem, it's much "softer" than the ones I used in the dummy test.
Also it is still a tri-setup and not a quad, hopefully this eve. I can take another look at it.
Also it is still a tri-setup and not a quad, hopefully this eve. I can take another look at it.
TDP_1_1_STIFFNESS = 700000 TDP_1_1_DAMPING = 120000
Weird. The VB version is good but the DLL version the nose is sticking down.
VB
dll
VB
TDP_1_0_POS = 0 -3.4 10
TDP_1_0_STIFFNESS = 221733
TDP_1_0_DAMPING = 156068
TDP_1_0_MU = 0.1
TDP_1_0_MULNG = 0.2
TDP_1_1_POS = -6 -3.2 -10
TDP_1_1_STIFFNESS = 221733
TDP_1_1_DAMPING = 156068
TDP_1_1_MU = 3
TDP_1_1_MULNG = 0.2
TDP_1_2_POS = 6 -3.2 -10
TDP_1_2_STIFFNESS = 221733
TDP_1_2_DAMPING = 156068
TDP_1_2_MU = 3
TDP_1_2_MULNG = 0.2
TDP_1_3_POS = 0 0 -16
TDP_1_3_STIFFNESS = 221733
TDP_1_3_DAMPING = 156068
TDP_1_3_MU = 3
TDP_1_3_MULNG = 0.2
TDP_1_4_POS = -8 3.2 -12
TDP_1_4_STIFFNESS = 221733
TDP_1_4_DAMPING = 156068
TDP_1_4_MU = 3
TDP_1_4_MULNG = 0.2
TDP_1_5_POS = 8 3.2 -12
TDP_1_5_STIFFNESS = 221733
TDP_1_5_DAMPING = 156068
TDP_1_5_MU = 3
TDP_1_5_MULNG = 0.2
TDP_1_6_POS = 0 3.2 0
TDP_1_6_STIFFNESS = 221733
TDP_1_6_DAMPING = 156068
TDP_1_6_MU = 3
TDP_1_6_MULNG = 0.2
TDP_1_7_POS = -8 3.2 12
TDP_1_7_STIFFNESS = 221733
TDP_1_7_DAMPING = 156068
TDP_1_7_MU = 3
TDP_1_7_MULNG = 0.2
TDP_1_8_POS = 8 3.2 12
TDP_1_8_STIFFNESS = 221733
TDP_1_8_DAMPING = 156068
TDP_1_8_MU = 3
TDP_1_8_MULNG = 0.2
TDP_1_9_POS = 0 0 16
TDP_1_9_STIFFNESS = 221733
TDP_1_9_DAMPING = 156068
TDP_1_9_MU = 3
TDP_1_9_MULNG = 0.2
dll
static const int ntdvtx = 10;
static TOUCHDOWNVTX tdvtx[ntdvtx] = {
{ _V(0, -3.4, 10), 221733, 156068, .1, 0.2 },
{ _V(-6 , -3.2, -10), 221733, 156068, 3.0, 0.2 },
{ _V(6 ,-3.2, -10), 221733, 156068, 3.0, 0.2 },
{_V(0 ,0 , 16), 221733, 156068, 3.0, 0.2 },
{_V(-8, 3.2, -12), 221733, 156068, 3.0, 0.2 },
{_V(8, 3.2, -12), 221733, 156068, 3.0, 0.2 },
{_V(0, 3.2, 0), 221733, 156068, 3.0, 0.2 },
{_V(-8, 3.2, 12), 221733, 156068, 3.0, 0.2 },
{_V(8, 3.2, 12), 221733, 156068, 3.0, 0.2 },
{_V(0, 0, 16), 221733, 156068, 3.0, 0.2 },
};
Attachments

Buck Rogers
Major Spacecadet
- Joined
- Feb 26, 2013
- Messages
- 1,232
- Reaction score
- 1,648
- Points
- 128
change .1 to 3{ _V(0, -3.4, 10), 221733, 156068, .1, 0.2 },
3.0, 0.2
Buck Rogers
Major Spacecadet
- Joined
- Feb 26, 2013
- Messages
- 1,232
- Reaction score
- 1,648
- Points
- 128
These are the DG TD points for ref.
static const DWORD ntdvtx_geardown = 13;
static TOUCHDOWNVTX tdvtx_geardown[ntdvtx_geardown] = {
{_V( 0 ,-2.57,10 ), 1e6, 1e5, 1.6, 0.1},
{_V(-3.5 ,-2.57,-1 ), 1e6, 1e5, 3.0, 0.2},
{_V( 3.5 ,-2.57,-1 ), 1e6, 1e5, 3.0, 0.2},
{_V(-8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V(-8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 0 , 2 , 6.2 ), 1e7, 1e5, 3.0},
{_V( 0 ,-0.6 ,10.65), 1e7, 1e5, 3.0}
};
static const DWORD ntdvtx_gearup = 13;
static TOUCHDOWNVTX tdvtx_gearup[ntdvtx_gearup] = {
{_V( 0 ,-1.5 ,9), 1e7, 1e5, 3.0, 3.0},
{_V(-6 ,-0.8 ,-5), 1e7, 1e5, 3.0, 3.0},
{_V( 3 ,-1.2 ,-5), 1e7, 1e5, 3.0, 3.0},
{_V(-8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V(-8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 0 , 2 , 6.2 ), 1e7, 1e5, 3.0},
{_V( 0 ,-0.6 ,10.65), 1e7, 1e5, 3.0}
};
I would suggest using these values
1e7, 1e5, 3.0, 3.0},
for all points as they represent metal on ground (note only the first 3 need the second 3.0)
-I think VB ignores the mu values?
Interesting touch- the gear-up setting is slightly off center for crash effect.
static const DWORD ntdvtx_geardown = 13;
static TOUCHDOWNVTX tdvtx_geardown[ntdvtx_geardown] = {
{_V( 0 ,-2.57,10 ), 1e6, 1e5, 1.6, 0.1},
{_V(-3.5 ,-2.57,-1 ), 1e6, 1e5, 3.0, 0.2},
{_V( 3.5 ,-2.57,-1 ), 1e6, 1e5, 3.0, 0.2},
{_V(-8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V(-8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 0 , 2 , 6.2 ), 1e7, 1e5, 3.0},
{_V( 0 ,-0.6 ,10.65), 1e7, 1e5, 3.0}
};
static const DWORD ntdvtx_gearup = 13;
static TOUCHDOWNVTX tdvtx_gearup[ntdvtx_gearup] = {
{_V( 0 ,-1.5 ,9), 1e7, 1e5, 3.0, 3.0},
{_V(-6 ,-0.8 ,-5), 1e7, 1e5, 3.0, 3.0},
{_V( 3 ,-1.2 ,-5), 1e7, 1e5, 3.0, 3.0},
{_V(-8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.3 ,-7.05), 1e7, 1e5, 3.0},
{_V(-8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V( 8.5 ,-0.4 ,-3 ), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-5.05), 1e7, 1e5, 3.0},
{_V(-8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 8.85, 2.3 ,-7.05), 1e7, 1e5, 3.0},
{_V( 0 , 2 , 6.2 ), 1e7, 1e5, 3.0},
{_V( 0 ,-0.6 ,10.65), 1e7, 1e5, 3.0}
};
I would suggest using these values
1e7, 1e5, 3.0, 3.0},
for all points as they represent metal on ground (note only the first 3 need the second 3.0)
-I think VB ignores the mu values?
Interesting touch- the gear-up setting is slightly off center for crash effect.
Last edited:
I used the Shuttle A code and adjusted the Y. level but slight rotation on the Pad.
{_V(-3 ,-3.12312, 12.5), 3.5e6, 3.5e5, 3},
{_V(-3 ,-3.12312,-13.5), 3e6, 3e5, 3},
{_V(3 ,-3.12312,-13.5), 3e6, 3e5, 3},
{_V(3 ,-3.12312, 12.5), 3.5e6, 3.5e5, 3},
{_V(-7.7, 0 ,-0.4), 3e7, 3e6, 3},
{_V(7.7, 0 ,-0.4), 3e7, 3e6, 3},
{_V(-1.5, 3 ,13.5), 3e7, 3e6, 3},
{_V(1.5, 3 ,13.5), 3e7, 3e6, 3},
{_V(-1.3, 2.8 ,17), 3e7, 3e6, 3},
{_V(1.3, 2.8 ,17), 3e7, 3e6, 3},
{_V(-1.8, 0 ,18.3), 3e7, 3e6, 3},
{_V(1.8, 0 ,18.3), 3e7, 3e6, 3},
{_V(-1.9, 2.2 ,-13.8), 3e7, 3e6, 3},
{_V(1.9, 2.2 ,-13.8), 3e7, 3e6, 3},
{_V(-3.3, 0 ,-14.9), 3e7, 3e6, 3},
{_V(3.3, 0 ,-14.9), 3e7, 3e6, 3}
- Joined
- Mar 23, 2008
- Messages
- 1,326
- Reaction score
- 1,656
- Points
- 128
- Website
- francisdrakex.deviantart.com
These are the touchdown points I used for the Peregrine lander.
The lander is quite lightweight (200 kg).
If your vessel is heavier, the spring stiffness (here: 1e7) should be higher, otherwise the belly sinks down to the ground.
The first 4 points are for touchdown, the last 2 are just for the top shape.
The lander is quite lightweight (200 kg).
If your vessel is heavier, the spring stiffness (here: 1e7) should be higher, otherwise the belly sinks down to the ground.
The first 4 points are for touchdown, the last 2 are just for the top shape.
Code:
static TOUCHDOWNVTX tdvtx_hover[ntdvtx_hover] = {
{ _V( 0, -1.19, 2.2), 1e7, 1e5, 2, 1},
{ _V( -2.2, -1.19, 0), 1e7, 1e5, 2, 1},
{ _V( 2.2, -1.19, 0), 1e7, 1e5, 2, 1},
{ _V( 0, -1.19, -2.2), 1e7, 1e5, 2},
{ _V( 1.5, 0.8, 0), 1e6, 2e5, 0.6},
{ _V(-1.5, 0.8, 0), 1e6, 2e5, 0.6}
};weird.
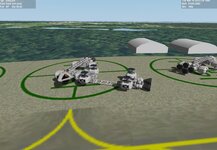
this is good but a slight rotation in the x heading.
I applied some hover and tried to land and i get this?
static const int ntdvtx = 16;
static TOUCHDOWNVTX tdvtx[ntdvtx] = {
{_V(-3 ,-3.12312, 12.5), 1e7, 1e5, 3.0, 3.0 },
{_V(-3 ,-3.12312,-13.5), 1e7, 1e5, 3.0, 3.0 },
{_V(3 ,-3.12312,-13.5), 1e7, 1e5, 3.0, 3.0 },
{_V(3 ,-3.12312, 12.5), 1e7, 1e5, 3.0, 3.0 },
{_V(-7.7, 0 ,-0.4), 1e7, 1e5, 3.0, 3.0 },
{_V(7.7, 0 ,-0.4), 1e7, 1e5, 3.0, 3.0 },
{_V(-1.5, 3 ,13.5), 1e7, 1e5, 3.0, 3.0 },
{_V(1.5, 3 ,13.5), 1e7, 1e5, 3.0, 3.0 },
{_V(-1.3, 2.8 ,17), 1e7, 1e5, 3.0, 3.0 },
{_V(1.3, 2.8 ,17), 1e7, 1e5, 3.0, 3.0 },
{_V(-1.8, 0 ,18.3), 1e7, 1e5, 3.0, 3.0 },
{_V(1.8, 0 ,18.3), 1e7, 1e5, 3.0, 3.0 },
{_V(-1.9, 2.2 ,-13.8), 1e7, 1e5, 3.0, 3.0 },
{_V(1.9, 2.2 ,-13.8), 1e7, 1e5, 3.0, 3.0 },
{_V(-3.3, 0 ,-14.9), 31e7, 1e5, 3.0, 3.0 },
{_V(3.3, 0 ,-14.9), 1e7, 1e5, 3.0, 3.0 }
};
this is good but a slight rotation in the x heading.
I applied some hover and tried to land and i get this?
Attachments
Buck Rogers
Major Spacecadet
- Joined
- Feb 26, 2013
- Messages
- 1,232
- Reaction score
- 1,648
- Points
- 128
31e7 can't be good{_V(-3.3, 0 ,-14.9), 31e7, 1e5, 3.0, 3.0 },
Fixed that. hovered up and rose up and then lowered. But the heading is changing while landed.
I used the parking brake and said landed but the heading lowly changing
I used the parking brake and said landed but the heading lowly changing
- Joined
- Mar 23, 2008
- Messages
- 1,326
- Reaction score
- 1,656
- Points
- 128
- Website
- francisdrakex.deviantart.com
To avoid the upside-down landing, the plane of the first 3 touchdown points shall define an upward vector.
I think it is like this:
Front (centerline), left, right.
Against the heading change when landed, you could try to increase the friction (but 3 is already high).
What is the mass of your vessel?
If it is too light, it tends not to settle down but keeps dancing with mini-hops, visible as jitter on the SurfaceMFD and the HUD.
I think it is like this:
Front (centerline), left, right.
Against the heading change when landed, you could try to increase the friction (but 3 is already high).
What is the mass of your vessel?
If it is too light, it tends not to settle down but keeps dancing with mini-hops, visible as jitter on the SurfaceMFD and the HUD.
Thanks
SetEmptyMass(173000.0);
and with fuel:
MAX_FUEL = 36000.0
SetEmptyMass(173000.0);
and with fuel:
MAX_FUEL = 36000.0
Here is something I am trying to fix. In the VC mode we have a mesh that the slope ladder,.... is displayed. Got that to work.
BUt when you pull up the UACS menu you get this.
I tried stretching the HUD mesh to make it wider. But the HUD display just stretched. Then I cut the edges and map them hoping to get the UACS menu on the sides. but all it did was map the center stuff to the sides.
That's way I think UACS might be good to be in a MFD. But I would need a lot of help to do that.
BUt when you pull up the UACS menu you get this.
I tried stretching the HUD mesh to make it wider. But the HUD display just stretched. Then I cut the edges and map them hoping to get the UACS menu on the sides. but all it did was map the center stuff to the sides.
That's way I think UACS might be good to be in a MFD. But I would need a lot of help to do that.
