So did you get it to work in 2016? Using similar code gets mine to move good in 2010 but spins badly in 2016.
Also does the laser guidance system work in 2010 version 3.0?
Also does the laser guidance system work in 2010 version 3.0?
Other than solving the CTD/freeze issue in D3D9Client RC-1, no work has been done on the Crawler.So did you get it to work in 2016? Using similar code gets mine to move good in 2010 but spins badly in 2016.
Yes.Also does the laser guidance system work in 2010 version 3.0?
We've already settled on using Fred18's MS2015 crawler, although it will require some modifications mainly so it can only turn when it is in motion. Another modification will be that it accelerates and decelerates properly (right now it's binary, either it moves or it doesn't). The crawler can go anywhere from 0 MPH to 2 MPH with the actual speed set by the operator in the driver cab. Normal speed when "docking" is around 0.05 MPH and speed while ascending/descending the pad ramp is 0.3 MPH.I am not sure if my code will work on your version.
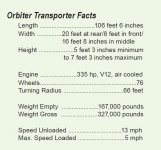
Ok, thanks.Not currently working on the trucks. The proper offset to use in the X-axis should be 13.176 m or 45'.
Are you sure? The corners are centered at 13.58725 (average).Not currently working on the trucks. The proper offset to use in the X-axis should be 13.176 m or 45'.
That's one of the many flaws with the current mesh(es). They're not properly sized. I'm working on a set of new ones that are much more accurate but it has been slow going due to the need to remove all those hidden triangles. Particularly hard is the catwalk handrails due to to their small diameter. In fact, I've decided to scrap the original ones and just create new ones using the old ones as guides.Ok, thanks.
I think after I do that I'll commit an initial version, still with the ramp issue (which looks more and more like animation trouble), and also missing scenario parameters and MLP testing. This way I can hop off to the Orbiter.msh to finally see how things are there.
---------- Post added at 07:05 PM ---------- Previous post was at 08:01 AM ----------
Are you sure? The corners are centered at 13.58725 (average).

Tested the OTS, and it needs some work on the steering. It should turn like a normal car, not like a tank. And the two Crawler scenarios just CTDs, no error messages at all so I can't test it.
This video of the STS-121 roll over shows how the OTS handles:
Discovery Rollover to the VAB - YouTube
Traced this to XRSound. With the OrbiterSound/XRSound bridge module enabled, I get the CTDs. Disabling it allows the scenarios to load successfully. But of course, without any sound from the crawler. And it looks like the LDS is still fully operational.And the two Crawler scenarios just CTDs, no error messages at all so I can't test it.
Checked the Crawler out some more, it seems like the CAB IN CONTROL logic is not part of the saving/loading function so you need to remember to activate which ever cab is supposed to be in control.
Also, the gauges are a bit dark, any way these can be lit up better? I'm talking abut the actual displays and not the physical hardware. Also, when in the 2° steering mode, the steering gauges shifts to showing only fractions of degree not the fully thing. So the leading digit is omitted so the gauges only show .xx instead of x.xx. Also the positive/negative signs look a bit distended.
Another nice thing to have would be to have the generators actually exhaust through the exhaust pipes. Especially on start up as the generators run on high-sulfuric content diesel so there's quite the noticeable black cloud of smoke.