You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
OHM Space Launch System for Orbiter 2016 0.1.2
- Thread starter OrbitHangar
- Start date
Thanks it she has 2 cameras and the end Effectors. I will need to figure out where the C-2 arm has them
- Joined
- Feb 4, 2008
- Messages
- 9,753
- Reaction score
- 1,024
- Points
- 203
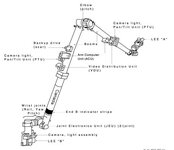
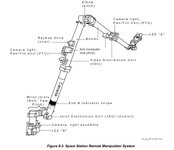
Candararm" (the "big arm"/Space Station Remote Manipulator System(SSRMS)) have four CCTV cameras, two "elbow" cameras mounted on Pan/Tilt Units (PTUs) and two on the two Latching End Effectors (LEEs). The SSRMS is essentially two "arms" combined into one unit, joined at the shoulder joint. This how it is able to "walkaround" by attaching a LEE to a Power Data Grapple Fixture (PDGF). Each joint is independent from the other, even on the other end and each joint can be replaced as it is its own Orbital Replacement Unit (ORU). This once happened on STS-111, where EVs Philippe Perrin and Franklin Chang-Diaz replaced one of the original SSRMS wrist roll joints with a new ORU that was late manifested on the flight.Thanks it she has 2 cameras and the end Effectors. I will need to figure out where the C-2 arm has them
Last edited:
Ok. Thanks. I will look at meshes,....Candararm" (the "big arm"/Space Station Remote Manipulator System(SSRMS)) have four CCTV cameras, two "elbow" cameras mounted on Pan/Tilt Units (PTUs) and two on the two Latching End Effectors (LEEs). The SSRMS is essentially two "arms" combined into one unit, joined at the shoulder joint. This how it is able to "walkaround" by attaching a LEE to a Power Data Grapple Fixture (PDGF). Each joint is independent from the other, even on the other end and each joint can be replaced as it is its own Orbital Replacement Unit (ORU). This once happened on STS-111, where EVs Philippe Perrin and Franklin Chang-Diaz replaced one of the original SSRMS wrist roll joints with a new ORU that was late manifested on the flight.


Since there is parent attachments on both ends. With the animation you need to have a reference as to which joint to move. I suppose a button to attach/detach which end also.
@DaveS Hope you can explain this.
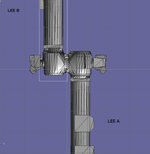
On the C2arm. There is a LEE A and LEE B. Could both attach items? I am thinking in orbiter both ends need Parent attachments, right.
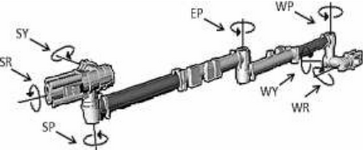
If LEE A is attached to a Vessel . In the schematic LEE B is the wrist yaw, pitch, roll. So LEE A is the Shoulder yaw, roll, pitch. So does shoulder action move the LEE A? Just like the wrist action move the LEE B.
I wish we had the SSRMSD code to get the translation part
On the C2arm. There is a LEE A and LEE B. Could both attach items? I am thinking in orbiter both ends need Parent attachments, right.
If LEE A is attached to a Vessel . In the schematic LEE B is the wrist yaw, pitch, roll. So LEE A is the Shoulder yaw, roll, pitch. So does shoulder action move the LEE A? Just like the wrist action move the LEE B.
I wish we had the SSRMSD code to get the translation part
So as I understand it, Only LEE_B rotates with the wrist Roll, right. And on the shoulder roll the arm rotates but the LEE_A does not, right?
I thought both end could attach?
I thought both end could attach?
Attachments

A bit confused.
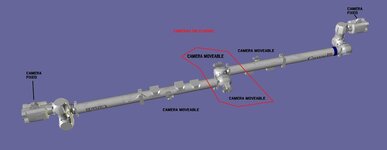
Cameras for the Canadarm3.
So as I see it on the C3 the cameras are on the arm swivels versus the arms elbow.
Canadarm3
So 4 cameras. 2 on the swivel joints and 2 at the Effectors, right
Cameras for the Canadarm3.
So as I see it on the C3 the cameras are on the arm swivels versus the arms elbow.
Canadarm3
- One on each boom on swivel mounts
- The other two on the "hands"
So 4 cameras. 2 on the swivel joints and 2 at the Effectors, right
Attachments


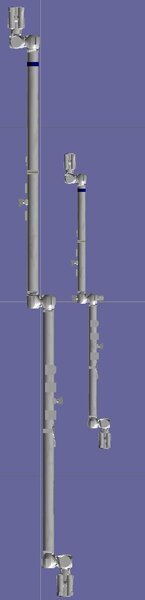
Well in the image they appear to be on the arm and joints?
But the document says this:
But the document says this:
- One on each boom on swivel mounts
- Joined
- Feb 4, 2008
- Messages
- 9,753
- Reaction score
- 1,024
- Points
- 203
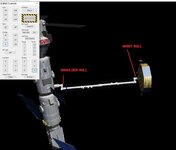
Circled areas in the attached photo shows the SSRMS Elbow cameras on their Pan/Tilt Units (PTUs) AKA "swivel mounts". Also, don't be too literal on PR CG materials, those can be wildly incorrect (see how long SLS sported it's "Saturn V" appearance despite never having it the first place also, Delta IV CBCs sporting the "Delta Blue" paint despite being only tested once in a lab and never more).
Attachments

Thanks. But I am trying to make the Canandarm3.
On the SSRMS how to switch cameras
On the SSRMS how to switch cameras
I got it figured out. I was trying to duplicate the SSRSMD. Still things to figure out. It seems the focus is on the LEE A. while both are centered.
VC of the I_habitat and airlock and Fuel transfer. are possible. But would need to know what it would look like. Sure we can make a hollow cylinder with the docks there.
Probably needs beacons?? I guess red/green on the sides and a white on top??
External lights?
ON the Airlock it uses the ISS modified shuttle guys. BUt they have animations joints. so you can pose them,.....
VC of the I_habitat and airlock and Fuel transfer. are possible. But would need to know what it would look like. Sure we can make a hollow cylinder with the docks there.
Probably needs beacons?? I guess red/green on the sides and a white on top??
External lights?
ON the Airlock it uses the ISS modified shuttle guys. BUt they have animations joints. so you can pose them,.....
Similar threads
- Replies
- 0
- Views
- 1K
- Replies
- 2
- Views
- 2K
- Replies
- 10
- Views
- 4K