You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Project ISS A to Z, unique vessel
- Thread starter fred18
- Start date
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
Hi guys,
a small update from the module:
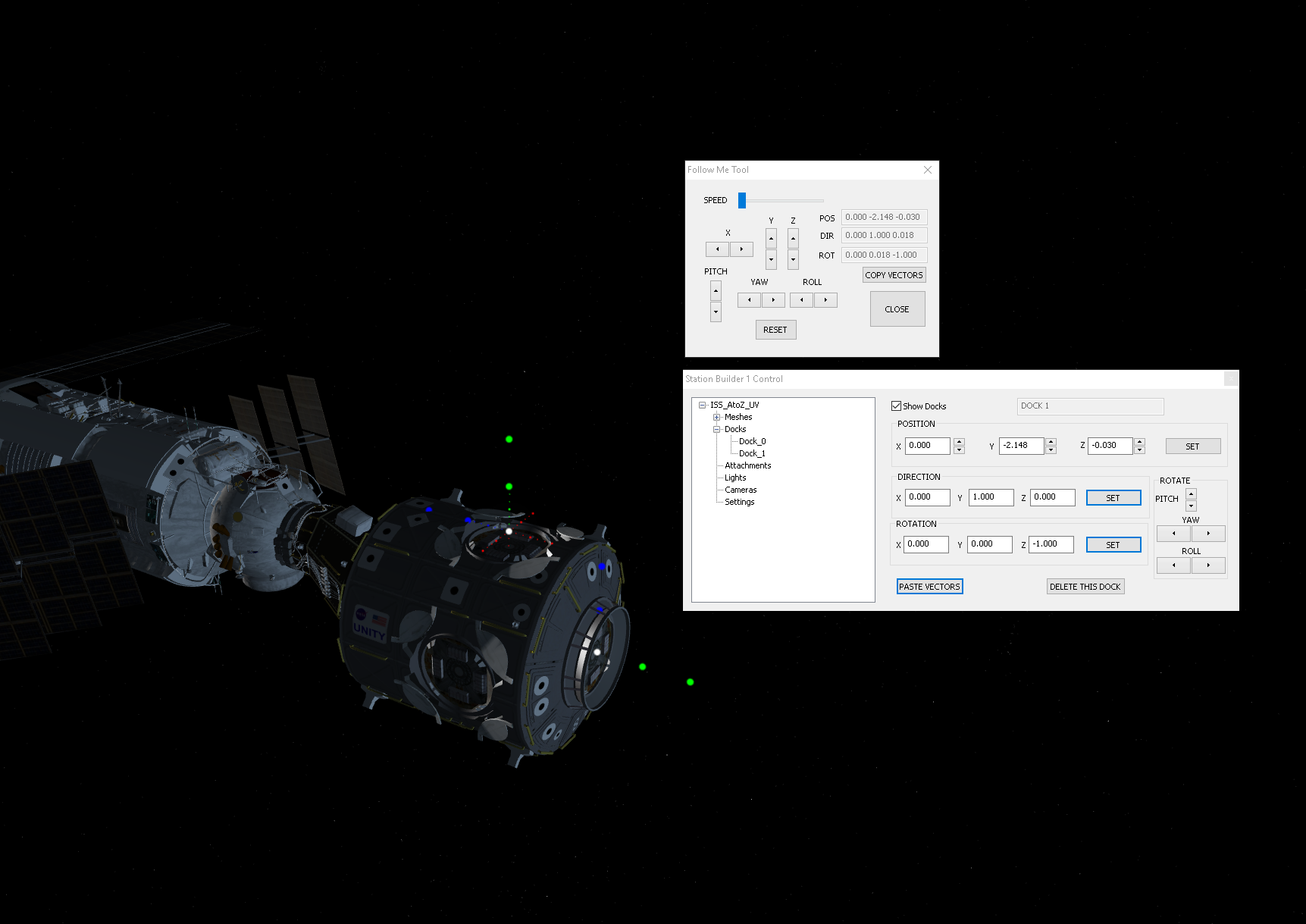
I completed also the dock control and implemented the controls of the "follow me" (as I like to call it) tool.
Remarks: dock definitions can be of course added and modified on the go. The flag "Show Docks" that you see in the window creates the green and blue dots that you see in the image. It is a visual representation of the dock: white dot is the docking point, green is the direction blue is the rotation.
The follow me tool has a "copy vectors" button, and everything around has the paste vectors button, so you can move the follow me tool in the point you wish to have a docking port, rotate it properly (which is quite easy) and then copy and paste the vectors for the dock definitions and that's it: you'll find your dock at the right place in just a couple of clicks, all within the sim.
I'll go on with attachments now, that is very very similar so it won't take too long.
I have to say that the idea of implementing this to the maximum adding also animations, thrusters etc is getting bigger in my mind... I don't want to loose the focus, so the station part that will allow to have the ISS AtoZ in one vessel will be the priority, but if i find the way to properly implement animations directly through this system it would be a huge improvement for the station part itself... let's see!
a small update from the module:
I completed also the dock control and implemented the controls of the "follow me" (as I like to call it) tool.
Remarks: dock definitions can be of course added and modified on the go. The flag "Show Docks" that you see in the window creates the green and blue dots that you see in the image. It is a visual representation of the dock: white dot is the docking point, green is the direction blue is the rotation.
The follow me tool has a "copy vectors" button, and everything around has the paste vectors button, so you can move the follow me tool in the point you wish to have a docking port, rotate it properly (which is quite easy) and then copy and paste the vectors for the dock definitions and that's it: you'll find your dock at the right place in just a couple of clicks, all within the sim.
I'll go on with attachments now, that is very very similar so it won't take too long.
I have to say that the idea of implementing this to the maximum adding also animations, thrusters etc is getting bigger in my mind... I don't want to loose the focus, so the station part that will allow to have the ISS AtoZ in one vessel will be the priority, but if i find the way to properly implement animations directly through this system it would be a huge improvement for the station part itself... let's see!
- Joined
- Feb 6, 2008
- Messages
- 38,938
- Reaction score
- 3,937
- Points
- 203
- Location
- Wolfsburg
- Preferred Pronouns
- Sire
All the experts: please don't jump at me already if you see any imperfection because this is just the first step...
(Comic Book Guy voice) That's the worst ISS ever.
 Almost as if Riker gets replaced by Jar Jar Binks on TNG.
Almost as if Riker gets replaced by Jar Jar Binks on TNG. 
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
[Picard voice]: "Number one... you have the bridge"(Comic Book Guy voice) That's the worst ISS ever.
[Jar Jar]: MIIIIsa have the briiiiidge
- Joined
- Feb 6, 2008
- Messages
- 38,938
- Reaction score
- 3,937
- Points
- 203
- Location
- Wolfsburg
- Preferred Pronouns
- Sire
[Picard voice]: "Number one... you have the bridge"
[Jar Jar]: MIIIIsa have the briiiiidge
OK. You won. THAT is really worse. Much worse. :lol:
Gingin
Active member
Awsome work.
pappy2
Active member
- Joined
- May 3, 2012
- Messages
- 410
- Reaction score
- 43
- Points
- 43
Hello "Fred"
congratulations very nice invention and great work. :thumbup:
I have two questions:
- Fuel management for Zarya and Zvezda is it possible ?
- Is the construction of a rocket on the ground a possible possibility ?
Good luck for the future
Pappy2
congratulations very nice invention and great work. :thumbup:
I have two questions:
- Fuel management for Zarya and Zvezda is it possible ?
- Is the construction of a rocket on the ground a possible possibility ?
Good luck for the future
Pappy2
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
Hello "Fred"
congratulations very nice invention and great work. :thumbup:
Thanks! :tiphat:
- Fuel management for Zarya and Zvezda is it possible ?
Can you give me more details about what you mean here? could it be something like refueling the modules when there is something docked?
- Is the construction of a rocket on the ground a possible possibility ?
I thought about it as well, but a multistage rocket has a series of options that would be very complicated to add here (guidance, staging, fairing...). But I'm designing this to be very versatile also as fare as code, so I could reuse the code and starting from this setup create a new version of multistage relying on the same structure.
Gingin
Active member
That’s gonna be a whole new level for iss mission edition.
Can’t wait to fire ssu with that jewel")
Can’t wait to fire ssu with that jewel
pappy2
Active member
- Joined
- May 3, 2012
- Messages
- 410
- Reaction score
- 43
- Points
- 43
Can you give me more details about what you mean here? could it be something like refueling the modules when there is something docked?
Hello "Fred"
Refuel Zarya or Zvezda with a cargo Progress, and a possibility I did not think.
Although it seems to me that with the ships of "Thortons" (Orbiter 2010) this is possible.
I just thought for example: I install Zarya and as this module can contain fuel I fill the tanks through your interface.
That way I'll be able to play engines to circularize the orbit or raise it.
I hope you understand my bad english.
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
Hello "Fred"
Refuel Zarya or Zvezda with a cargo Progress, and a possibility I did not think.
Although it seems to me that with the ships of "Thortons" (Orbiter 2010) this is possible.
I just thought for example: I install Zarya and as this module can contain fuel I fill the tanks through your interface.
That way I'll be able to play engines to circularize the orbit or raise it.
I hope you understand my bad english.
I think I understand and yes it will be possible: you will just add 2 tanks to the station named Zarya and Zvezda and when a vessel is docked you will be able to choose which one to refill. Does refuel MFD does good this job? I could implement this in the module but if there is an MFD that does this well I'd rather focus on new aspects.
---------- Post added 12th Feb 2019 at 00:04 ---------- Previous post was 11th Feb 2019 at 23:13 ----------
So this is what I am currently working on: animations. It seems to work actually and that means that the step to get to a new complete vessel builder, totally in-sim, is much closer... And it also means (thinking of where we started from) that with a bit of work most of the animations currently in the ISS_AtoZ can be brought into the unique vessel as well.
This is just a brief test with just one petal of the cupola, but you will see the cupola mesh "dead" that gets easily animated. please note the use of the "follow me" tool with the "copy vectors" and "paste vectors" buttons which makes everything very easy, at least that is what it seems to me... the direction of the tool is the green part and that what is used as axis for rotations.
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
Hi guys,
even though silently in this weeks I kept working. I am very close to finish the animations part, which was really a headache due to the fact that I wanted to keep everything editable in sim so not really easy to implement. but it seems to work quite good.
I decided to add robotic arms as well. No inverse kinematics at all, but the possibility to link an animation to an attachment that will then get moved around. That should be easy and fun: you create the last animation and you choose the attachment to link it to and that's it. This is in progress.
I also need to find a way for this kind of animations to be activated: now each animation has a key assigned to it, but maybe for manual animations it's better to make defaults keys and let the user cycles through them, like in Generic Vessel or SC3... I need to think about this a bit.
my idea is that once finished this module will be a Vessel Builder that will allow to build almost any vehicle inside the sim. And with the plugin I created before for the ISS the first vehicle will be of course the ISS AtoZ, hopefully with all the animations.
A peculiarity is that everything is saved and loaded from the CFG file of the vessel, which means that any vessel can be spawned during sim without issues, and that it's much easier to save and reload parameters since the SetClassCaps happens before the LoadState...
anyway, I will keep you guys posted while I am progressing. I hope to put the end word to the animations section within this week so we will be a big step ahead.
After that I have in mind to implement:
- propellant tanks
- Thrusters (Main,hover, retro)
- attitude control (CMG or RCS)
- Touchdown points
- airfoils and relevant controls
- Cameras
- lights
- VC - I don't know yet what to expect here, we'll see.
even though silently in this weeks I kept working. I am very close to finish the animations part, which was really a headache due to the fact that I wanted to keep everything editable in sim so not really easy to implement. but it seems to work quite good.
I decided to add robotic arms as well. No inverse kinematics at all, but the possibility to link an animation to an attachment that will then get moved around. That should be easy and fun: you create the last animation and you choose the attachment to link it to and that's it. This is in progress.
I also need to find a way for this kind of animations to be activated: now each animation has a key assigned to it, but maybe for manual animations it's better to make defaults keys and let the user cycles through them, like in Generic Vessel or SC3... I need to think about this a bit.
my idea is that once finished this module will be a Vessel Builder that will allow to build almost any vehicle inside the sim. And with the plugin I created before for the ISS the first vehicle will be of course the ISS AtoZ, hopefully with all the animations.
A peculiarity is that everything is saved and loaded from the CFG file of the vessel, which means that any vessel can be spawned during sim without issues, and that it's much easier to save and reload parameters since the SetClassCaps happens before the LoadState...
anyway, I will keep you guys posted while I am progressing. I hope to put the end word to the animations section within this week so we will be a big step ahead.
After that I have in mind to implement:
- propellant tanks
- Thrusters (Main,hover, retro)
- attitude control (CMG or RCS)
- Touchdown points
- airfoils and relevant controls
- Cameras
- lights
- VC - I don't know yet what to expect here, we'll see.
If you could have a way of using the animations of one vessel remotely, such as a camera's pan/tilt inside the Cupola for instance, that would be SWEET !!
There are three screens in the Cupola VC for viewing. Also, has joysticks,buttons and switches. Just thought I would mention it. :thumbup:
There are three screens in the Cupola VC for viewing. Also, has joysticks,buttons and switches. Just thought I would mention it. :thumbup:
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
Robotic Arm Creation Demo video
Ok guys, time for a new demonstration video.
Who said that robotic arms were out of scope? :lol:
In this video I show the process of creation of SSRMSD robotic arm, including the arm tip procedure for the attachment in just under 15 minutes, everything in sim.
You will see at the very beginning of the video that the initial cfg only includes the class and module lines and I open a generic scenario with a DG landed somewhere. Then I spawn the empty SSRMSD vessel in sim with the scenario editor and start to work on it. At the end I add also a demo version of the HST (made with the vessel builder as well) just to show that the arm tip actually works.
You will notice also that I changed the graphics for the FollowMe Tool and the attachments revealers, so now you'll see long thin lines, like lasers, instead of balls. I thin it is far more useful in this way.
You may also see that around there is still the name "StationBuilder" but that will be changed in the future since the station will be a peculiar vessel, so this is going to be a VesselBuilder as said.
I hope you guys don't get bored with almost 15 minutes of video, but I'm confident that this new approach could be fun enough to see. Of course in the video I make some usage of the FollowMe tool which seems to be really useful.
If you guys have questions or suggestions please come forward, it's time for them, so I can make changes to the project before everything gets tangled together too much.
Cheers!
Fred
Ok guys, time for a new demonstration video.
Who said that robotic arms were out of scope? :lol:
In this video I show the process of creation of SSRMSD robotic arm, including the arm tip procedure for the attachment in just under 15 minutes, everything in sim.
You will see at the very beginning of the video that the initial cfg only includes the class and module lines and I open a generic scenario with a DG landed somewhere. Then I spawn the empty SSRMSD vessel in sim with the scenario editor and start to work on it. At the end I add also a demo version of the HST (made with the vessel builder as well) just to show that the arm tip actually works.
You will notice also that I changed the graphics for the FollowMe Tool and the attachments revealers, so now you'll see long thin lines, like lasers, instead of balls. I thin it is far more useful in this way.
You may also see that around there is still the name "StationBuilder" but that will be changed in the future since the station will be a peculiar vessel, so this is going to be a VesselBuilder as said.
I hope you guys don't get bored with almost 15 minutes of video, but I'm confident that this new approach could be fun enough to see. Of course in the video I make some usage of the FollowMe tool which seems to be really useful.
If you guys have questions or suggestions please come forward, it's time for them, so I can make changes to the project before everything gets tangled together too much.
Cheers!
Fred
Ok guys, time for a new demonstration video.
http://www.youtube.com/watch?v=dMtY7Mboeac
Who said that robotic arms were out of scope? :lol:
In this video I show the process of creation of SSRMSD robotic arm, including the arm tip procedure for the attachment in just under 15 minutes, everything in sim.
You will see at the very beginning of the video that the initial cfg only includes the class and module lines and I open a generic scenario with a DG landed somewhere. Then I spawn the empty SSRMSD vessel in sim with the scenario editor and start to work on it. At the end I add also a demo version of the HST (made with the vessel builder as well) just to show that the arm tip actually works.
You will notice also that I changed the graphics for the FollowMe Tool and the attachments revealers, so now you'll see long thin lines, like lasers, instead of balls. I thin it is far more useful in this way.
You may also see that around there is still the name "StationBuilder" but that will be changed in the future since the station will be a peculiar vessel, so this is going to be a VesselBuilder as said.
I hope you guys don't get bored with almost 15 minutes of video, but I'm confident that this new approach could be fun enough to see. Of course in the video I make some usage of the FollowMe tool which seems to be really useful.
If you guys have questions or suggestions please come forward, it's time for them, so I can make changes to the project before everything gets tangled together too much.
Cheers!
Fred
This is awesome fred!
One thing I noticed when you start moving HST with the arm (time 14':10" in the video) the SSRMS End Effector does not rotate though. Maybe just my impression..
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
Will you be able to add weights and thrust values ? A list of thrust textures maybe ?
sure, everything of the basic stuff will be available. that's the easy part
") masses, fuel tanks, thrusters, particles, exhaust textures etc. Those are just a matter of correctly build the system, but not too complicated. The next things that are going to be very complicated after animations are the airfoils and the VC, but I will keep those as last part, so they won't compromize the rest of the work.
masses, fuel tanks, thrusters, particles, exhaust textures etc. Those are just a matter of correctly build the system, but not too complicated. The next things that are going to be very complicated after animations are the airfoils and the VC, but I will keep those as last part, so they won't compromize the rest of the work.This is awesome fred!
One thing I noticed when you start moving HST with the arm (time 14':10" in the video) the SSRMS End Effector does not rotate though. Maybe just my impression..
That is very likely but it's not module's fault but mine: in order to show the attachment rotation in the last animation I just put the arm tip and that was it. I probably should have done an end effector animation and then put a fake animation with the tip, but the point was to show that the tip animation was working so I did it in this way.
Another point I'd like to remark about the procedure of the video is that for the TIP, instead of doing as it was done up to now, the developers will be able to choose directly an attachment from the list.
That speeds up a lot the whole process!
- Joined
- Feb 2, 2012
- Messages
- 1,664
- Reaction score
- 115
- Points
- 78
Thrusters and Thruster Groups interfaces done and working. Will come up with a demo video soon. Next step is adding the particle stream definitions which is easy but boring 
Then the Gyro Attitude Control option, touchdown points,Arifoils and aero controls, Cameras, lights and VC and that will be done.
I have two questions:
1) for the mods: I think that this thread should be renamed to be the VesselBuilder project (of which ISS A to Z Unique Vessel will be a first (very big) example). I'm not very accustomed to the forum procedures, can I do it, shall anyone from the mods do it? thanks in advance for that.
2) for anyone: the module will be highly intuitive but there is nothing better than a video tutorial. I could do that but with two small daughters at home it seems impossible to me to find like 1 hour of silence to make a long and comprehensive video. Is anyone good at this stuff who is willing to help?
Cheers
Fred
Then the Gyro Attitude Control option, touchdown points,Arifoils and aero controls, Cameras, lights and VC and that will be done.
I have two questions:
1) for the mods: I think that this thread should be renamed to be the VesselBuilder project (of which ISS A to Z Unique Vessel will be a first (very big) example). I'm not very accustomed to the forum procedures, can I do it, shall anyone from the mods do it? thanks in advance for that.
2) for anyone: the module will be highly intuitive but there is nothing better than a video tutorial. I could do that but with two small daughters at home it seems impossible to me to find like 1 hour of silence to make a long and comprehensive video. Is anyone good at this stuff who is willing to help?
Cheers
Fred
Similar threads
- Replies
- 8
- Views
- 4K
- Replies
- 34
- Views
- 9K
- Replies
- 2
- Views
- 612
- Replies
- 4
- Views
- 2K